

Method for generating flight path of unmanned aerial vehicle
A drone and track technology, applied in the field of drones, can solve the problems of poor track efficiency of drones, and achieve the effects of smooth and continuous track, wide application prospects, and improved capabilities.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with example, accompanying drawing, the present invention is described in detail.
[0032] Realize the overall flow of the unmanned aerial vehicle track planning that the present invention proposes is:
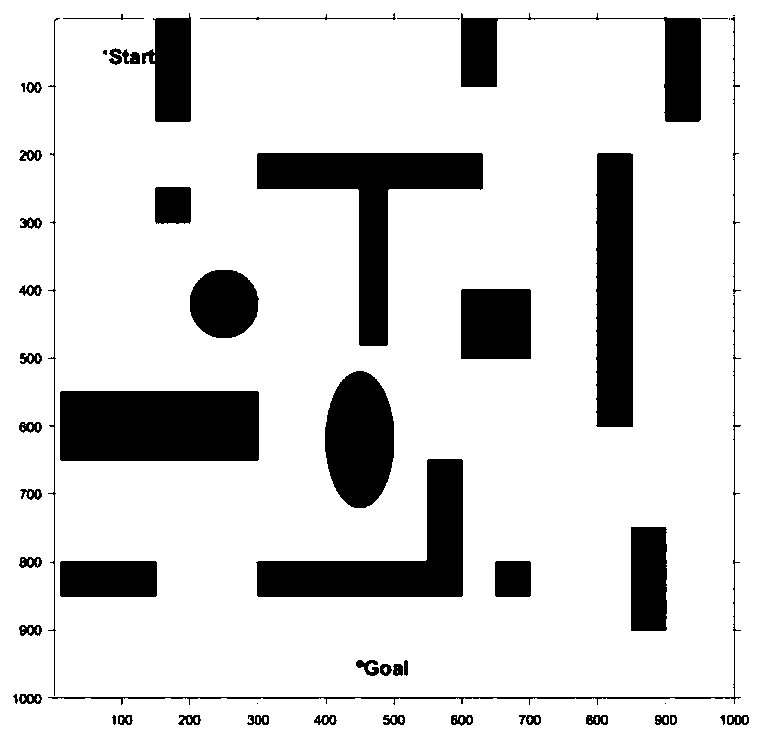
[0033] Step 1: Modeling of flight environment and UAV dynamic constraints
[0034] The flight environment model includes natural environment modeling and threat area modeling. The natural environment modeling is mainly the threat of terrain fluctuations, such as high mountains, and the threat area mainly considers the no-fly zone during the flight of the drone. This method assumes that the UAV is flying at a constant altitude, and the environment is modeled in a two-dimensional horizontal plane, and the mountain peaks and highlands that may pose a threat to the flight of the UAV at the set flying height are projected onto the horizontal plane to form a natural environment model. .
[0035] After the flight environment model is determined, the map ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More