

Multi-degree-of-freedom lower limb rehabilitation robot
A technology of rehabilitation robot and degree of freedom, which is applied in the direction of equipment for compressing reflex points, equipment for helping people walk, physical therapy, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
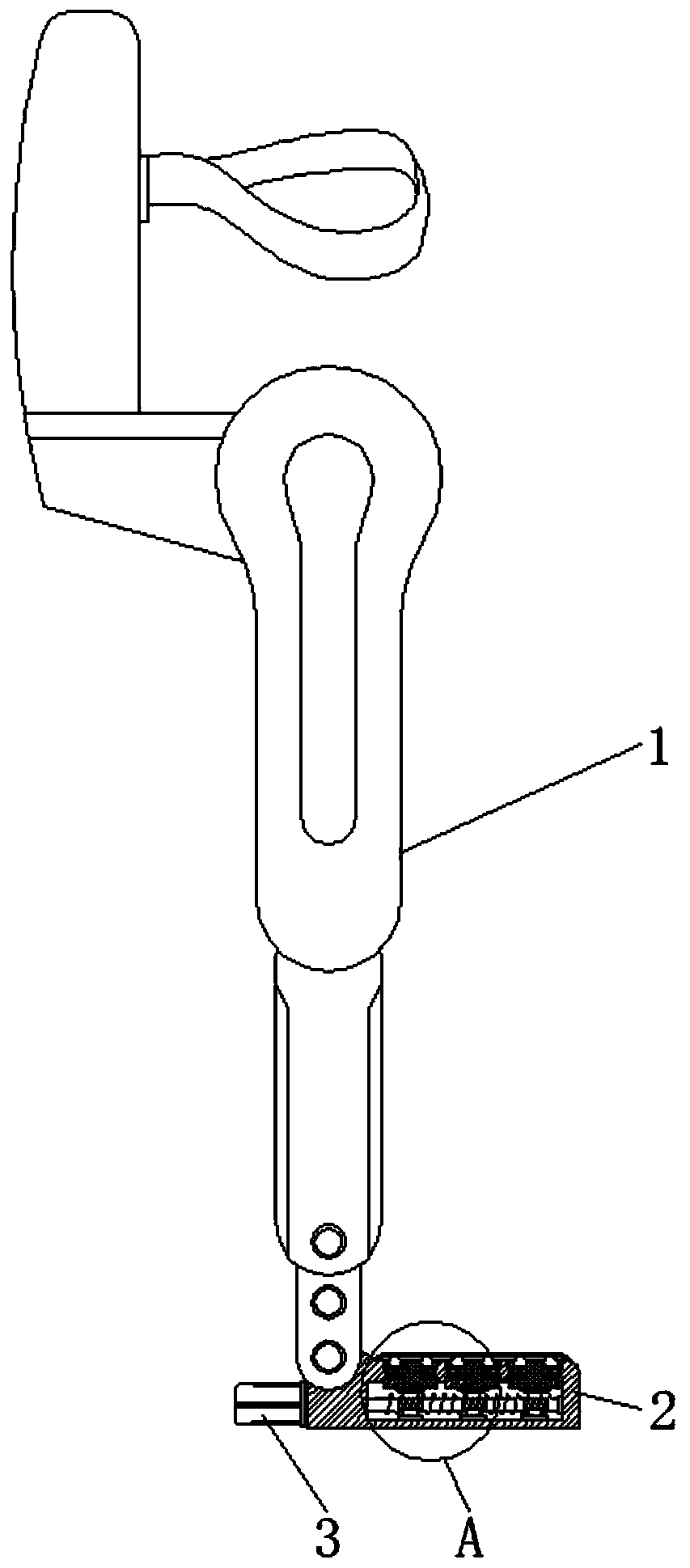
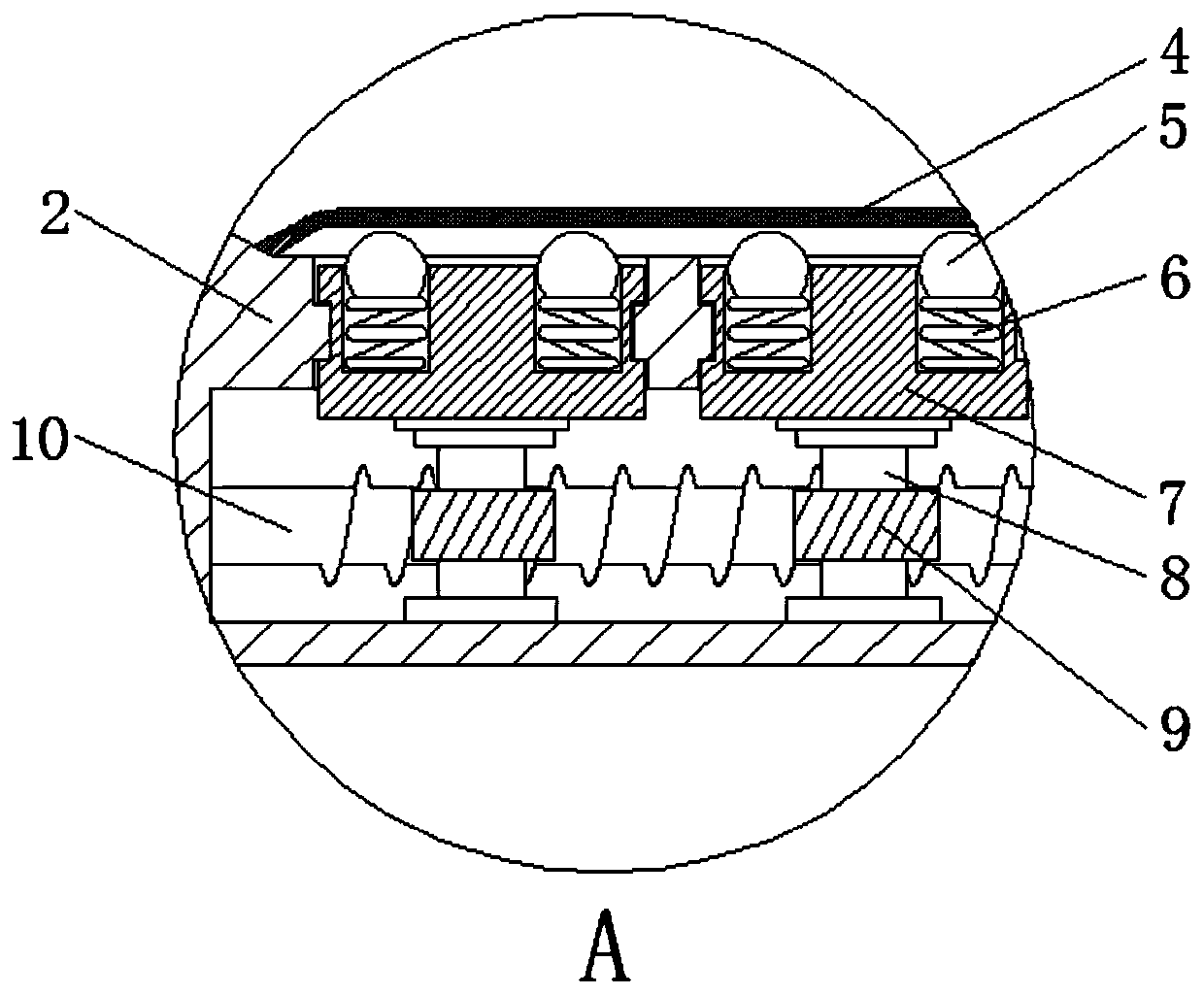
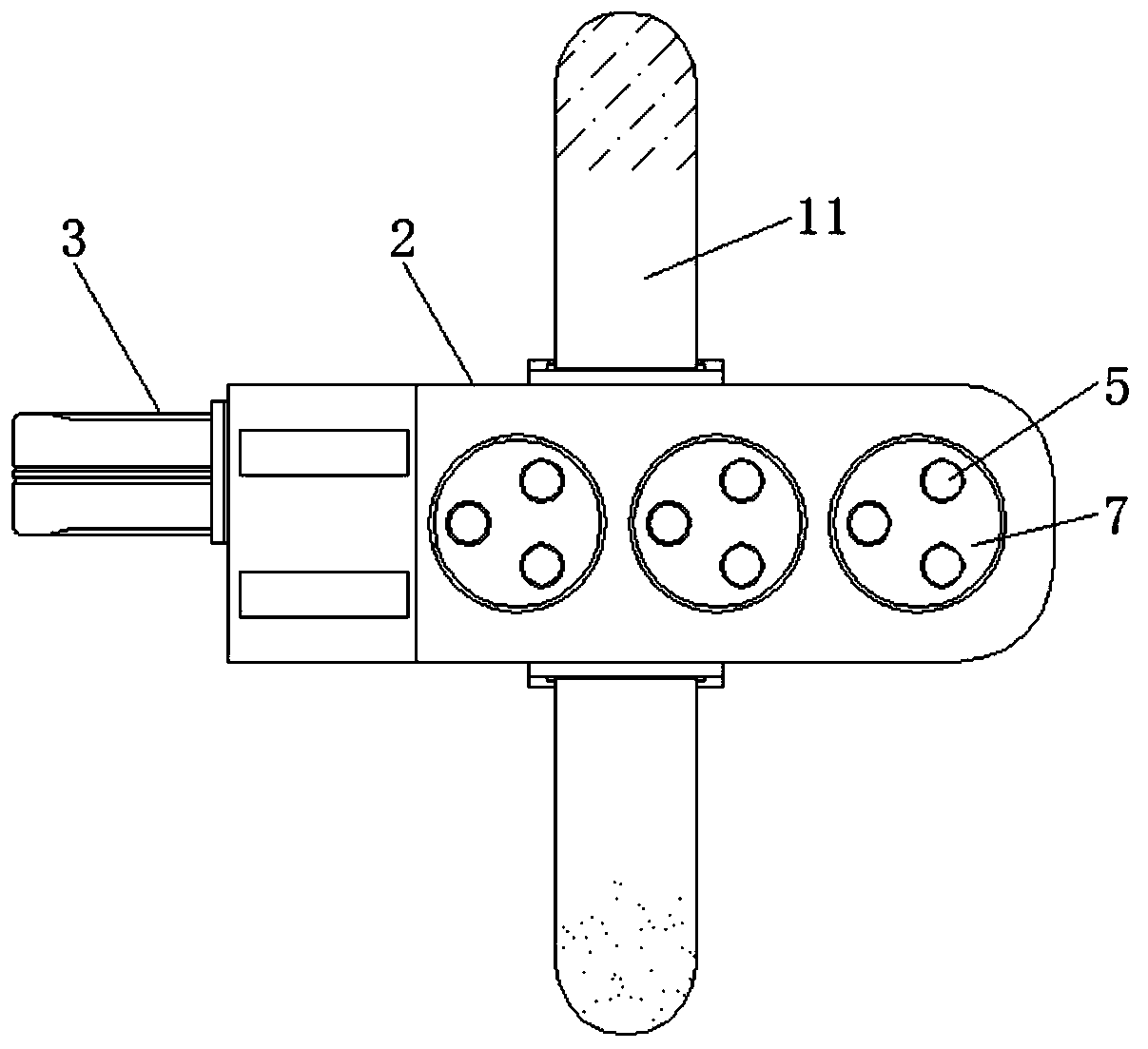
[0019] Embodiment 1: A lower limb rehabilitation robot with multiple degrees of freedom, comprising a lower limb rehabilitation robot main body 1, a foot support plate 2 is arranged at the bottom of the lower limb rehabilitation robot main body 1, and the foot support plate 2 is hinged with the lower end of the lower limb rehabilitation robot main body 1, and the feet The top of the support plate 2 is provided with a round hole, and a disc 7 is arranged in the round hole, and the disc 7 is connected to the round hole for rotation, and the top of the disc 7 is provided with a ball 5, and the ball 5 is driven by the disc 7 The rotation can have a massage effect on the angle of the patient. A cylindrical groove is provided on the disc 7, and the ball 5 is located in the cylindrical groove, and the ball 5 is slidably connected with the inner wall of the cylindrical groove, and the ball 5 The bottom is connected with the upper end of the compression spring 6, the lower end of the co...
Embodiment 2
[0020] Embodiment 2: The gasket 4 can be made of leather, which is easier to clean.
[0021] Working principle: When using the multi-degree-of-freedom lower limb rehabilitation robot, first check whether the device is damaged or not connected firmly, and then use it after checking, and tie the patient's leg to the lower limb rehabilitation robot through straps On the main body 1, the sole of the patient's foot rests on the top of the foot support plate 2. When a foot massage is required, the motor 3 is started, and the motor 3 drives the connected worm 10 to rotate, and the worm 10 drives the worm gear 9 to rotate. The support shaft 8 is fixedly connected, and the support shaft 8 is fixedly connected with the disk 7, so that the disk 7 can be driven to rotate together. The disk 7 is provided with a ball 5, so that the ball 5 is driven to rotate, and the ball 5 protrudes from the foot. The top of the support plate 2 enables the patient's feet to be in contact with the ball 5, s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More