Thermal insulation performance detection system for thermal insulation container
A technology of thermal insulation container and thermal insulation performance, applied in instruments, processing response signals of detection, using sonic/ultrasonic/infrasonic waves to analyze solids, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
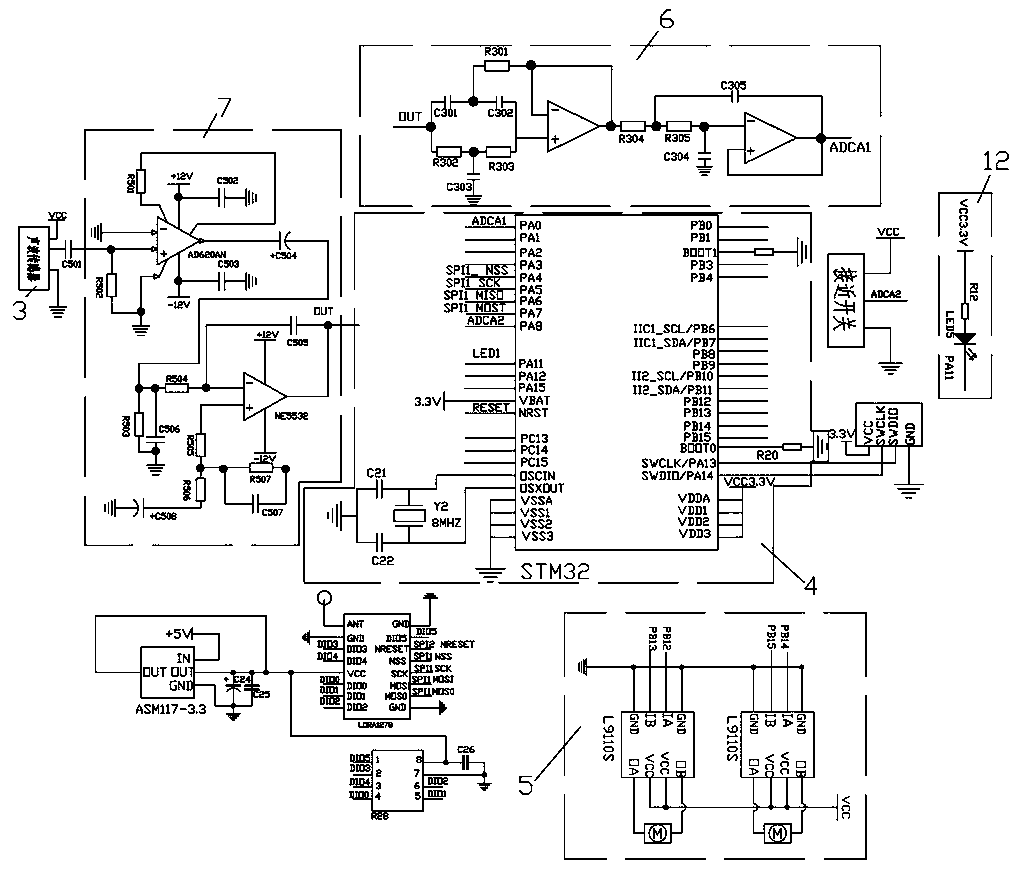
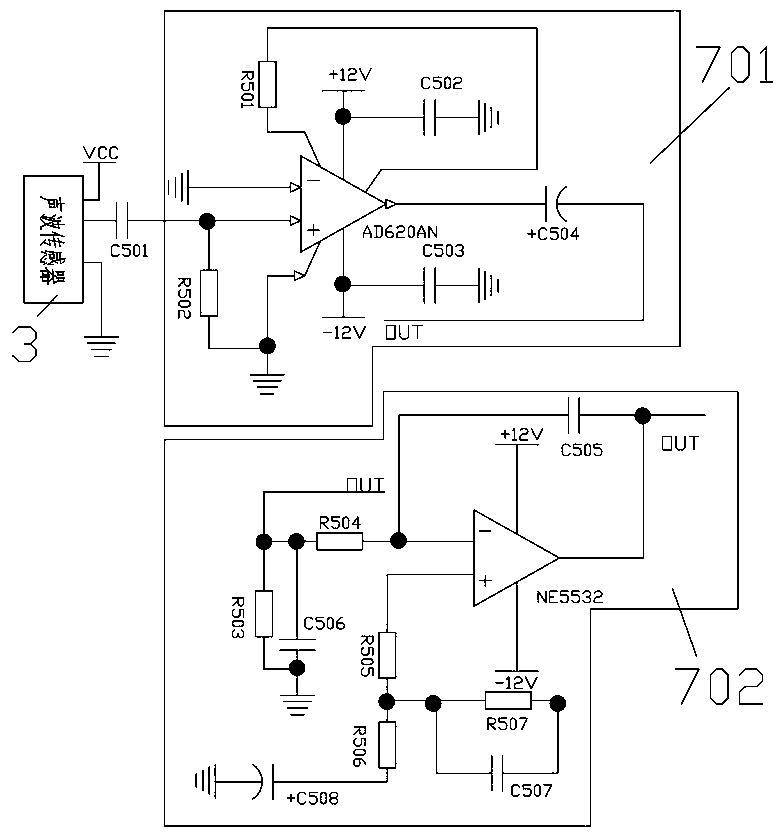
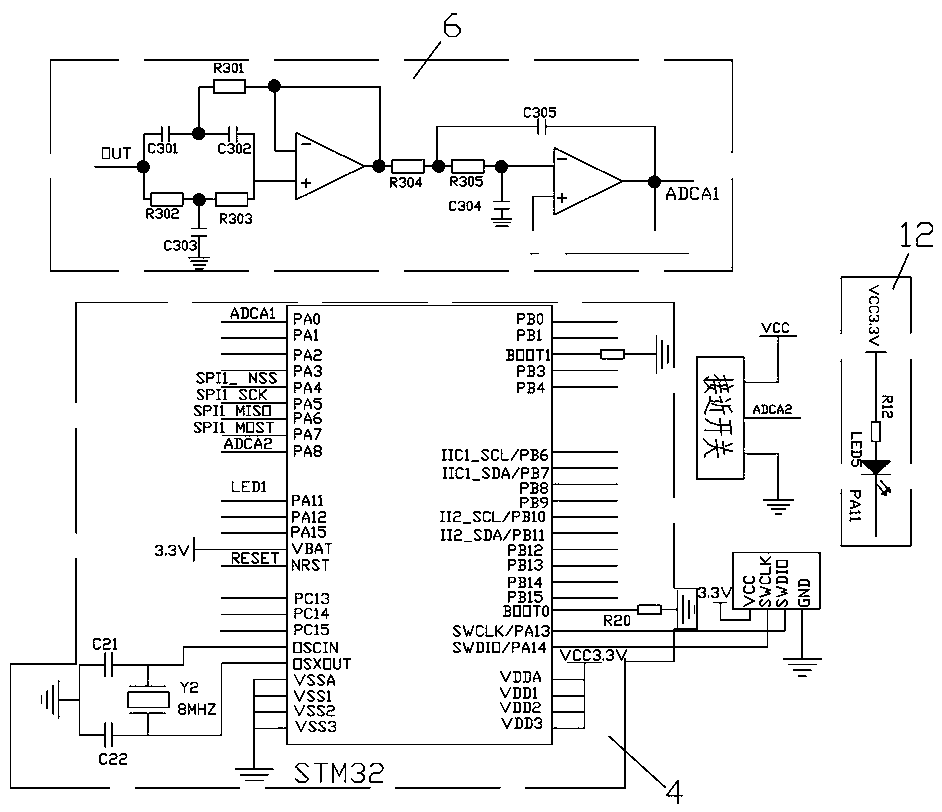
[0027] like Figure 1~6 As shown, a thermal insulation performance detection system for thermal insulation containers includes a detection device for conveying thermal insulation containers and detecting the thermal insulation structure of thermal insulation containers and a control system for judging the detection results, the detection The device includes a sounding device 1, a conveyor belt 2, a plurality of mechanical arms and an acoustic wave sensor 3 arranged on the mechanical arm. The acoustic wave sensor 3 is used to detect the sound waves emitted by the sounding device 1. The mechanical arm is equidistantly arranged along the outer arc of the conveyor belt 2, and the sounding device 1 is arranged at the intersection of the radiuses at both ends of the arc section of the conveyor belt 2;
[0028] Described control system is arranged on the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com