

Road edge detection method based on three-dimensional laser radar
A three-dimensional laser and detection method technology, which is applied in the field of traffic road environment perception in smart car technology, can solve the problems of low detection accuracy and achieve the effects of high accuracy, small detection error, and large amount of data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to express the purpose, technical solutions and advantages of the present invention more clearly, the present invention will be further described in detail below with reference to the accompanying drawings and specific implementation cases.
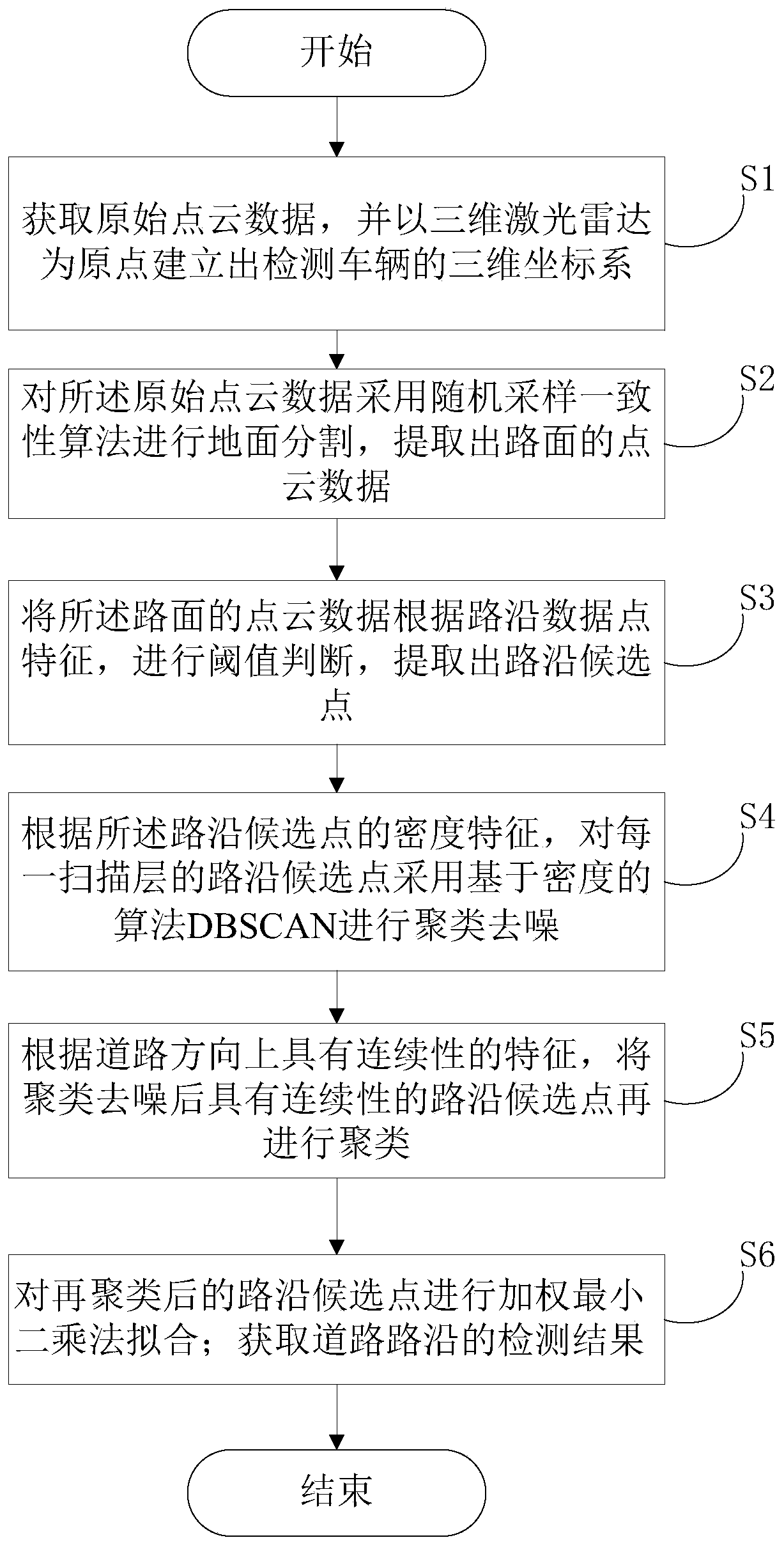
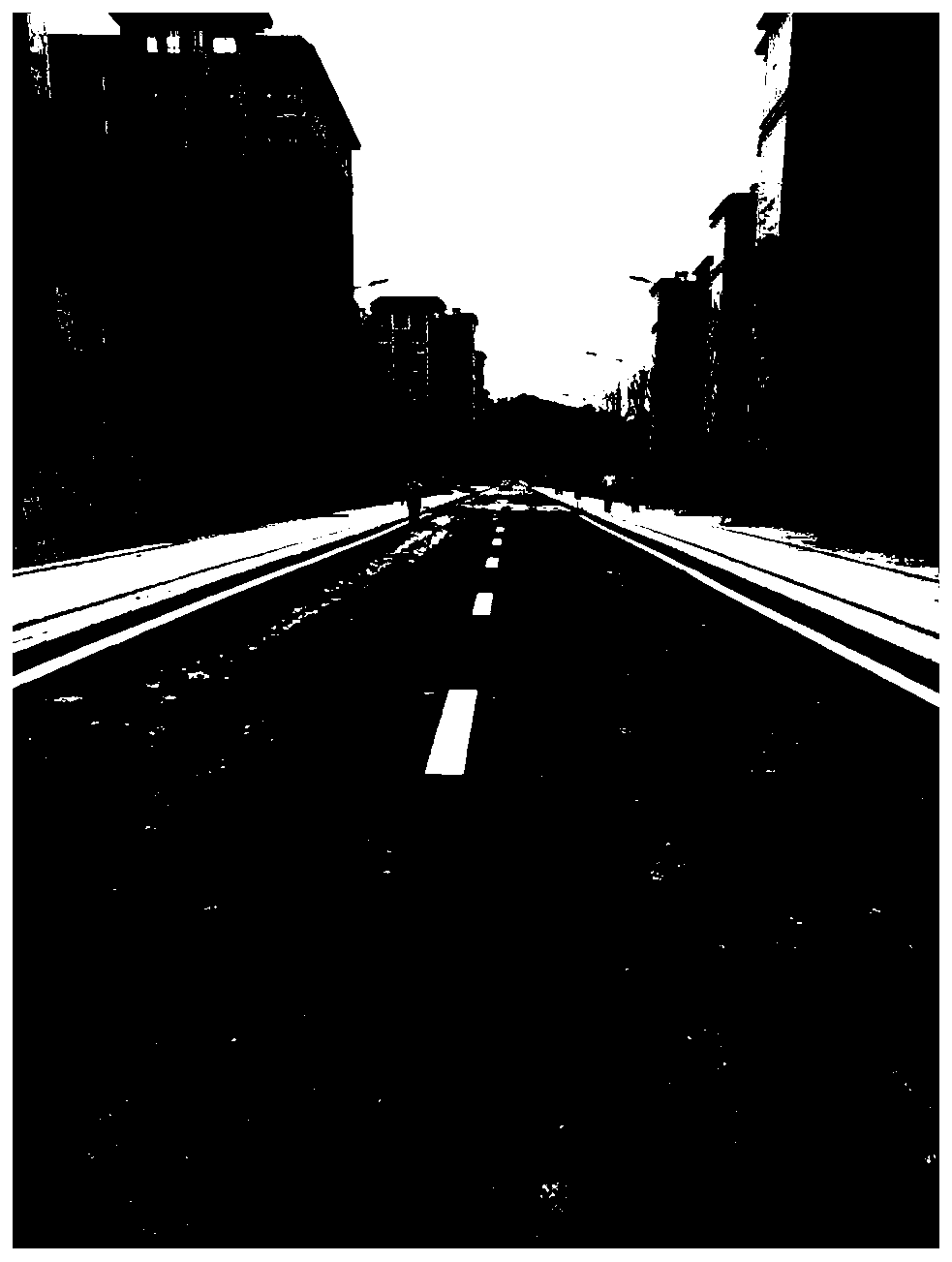
[0040] As an optional method, this embodiment selects Velodyne 16 line lidar as the sensor to implement a road edge detection method based on 3D lidar. The experimental scene is as follows figure 2 shown, the specific steps are:
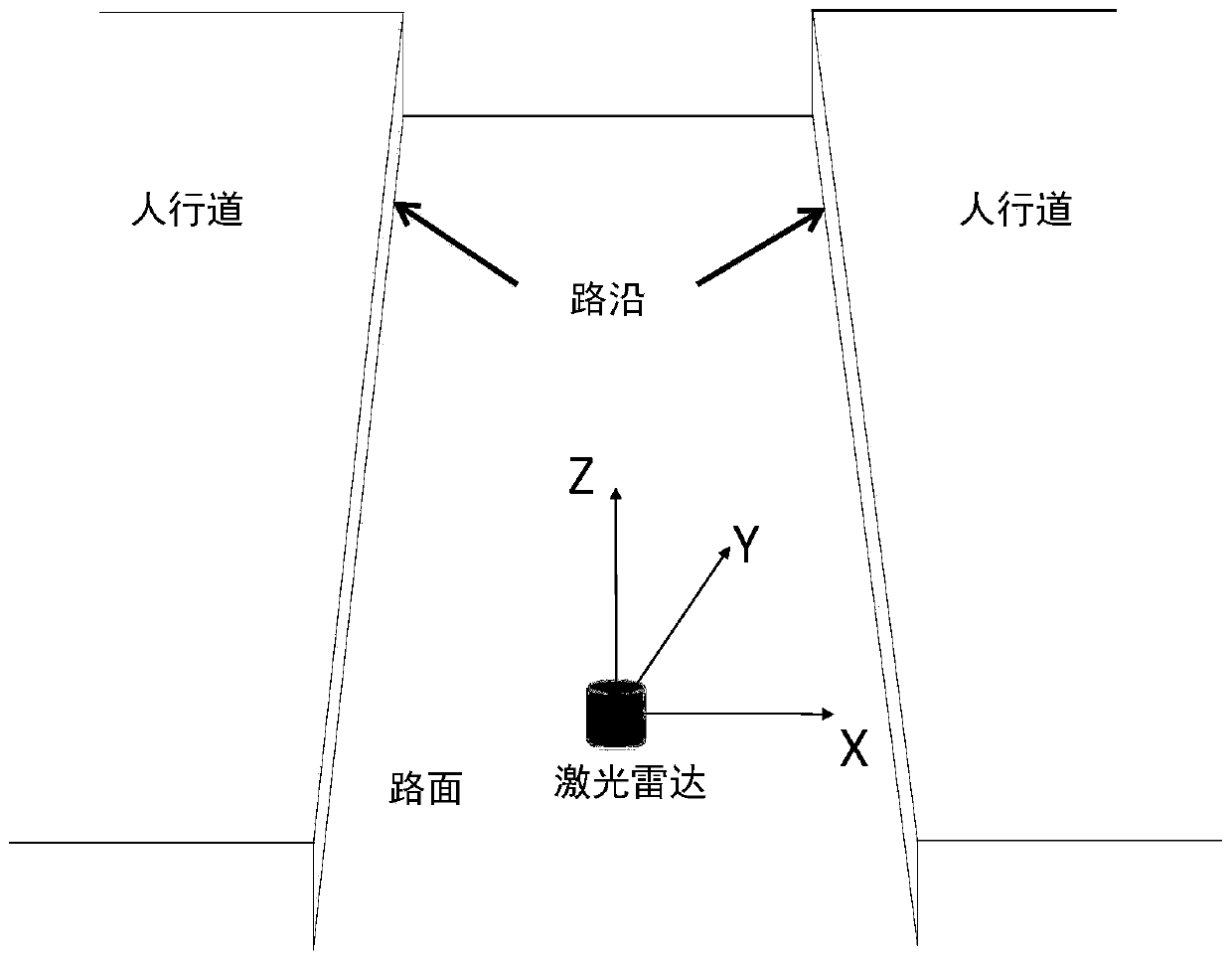
[0041] S1. Scan the road environment through the 3D lidar, obtain the original point cloud data, and establish a 3D coordinate system of the detected vehicle with the 3D lidar as the origin.
[0042] The road environment is scanned by the 3D lidar to obtain the original point cloud data of the object. The points reflected from the surface of the object scanned by the laser emitted by the lidar include the 3D coordinates of the object, reflection intensity, scanning layer, distance, azimuth, etc....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More