
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Suspension control method and device for capsule endoscope
A technology of capsule endoscopy and suspension control, which is applied in the direction of endoscope, gastroscope, esophagus, etc., and can solve the problems of being unable to control the distance between the capsule endoscope and the stomach wall, and failing to obtain better imaging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
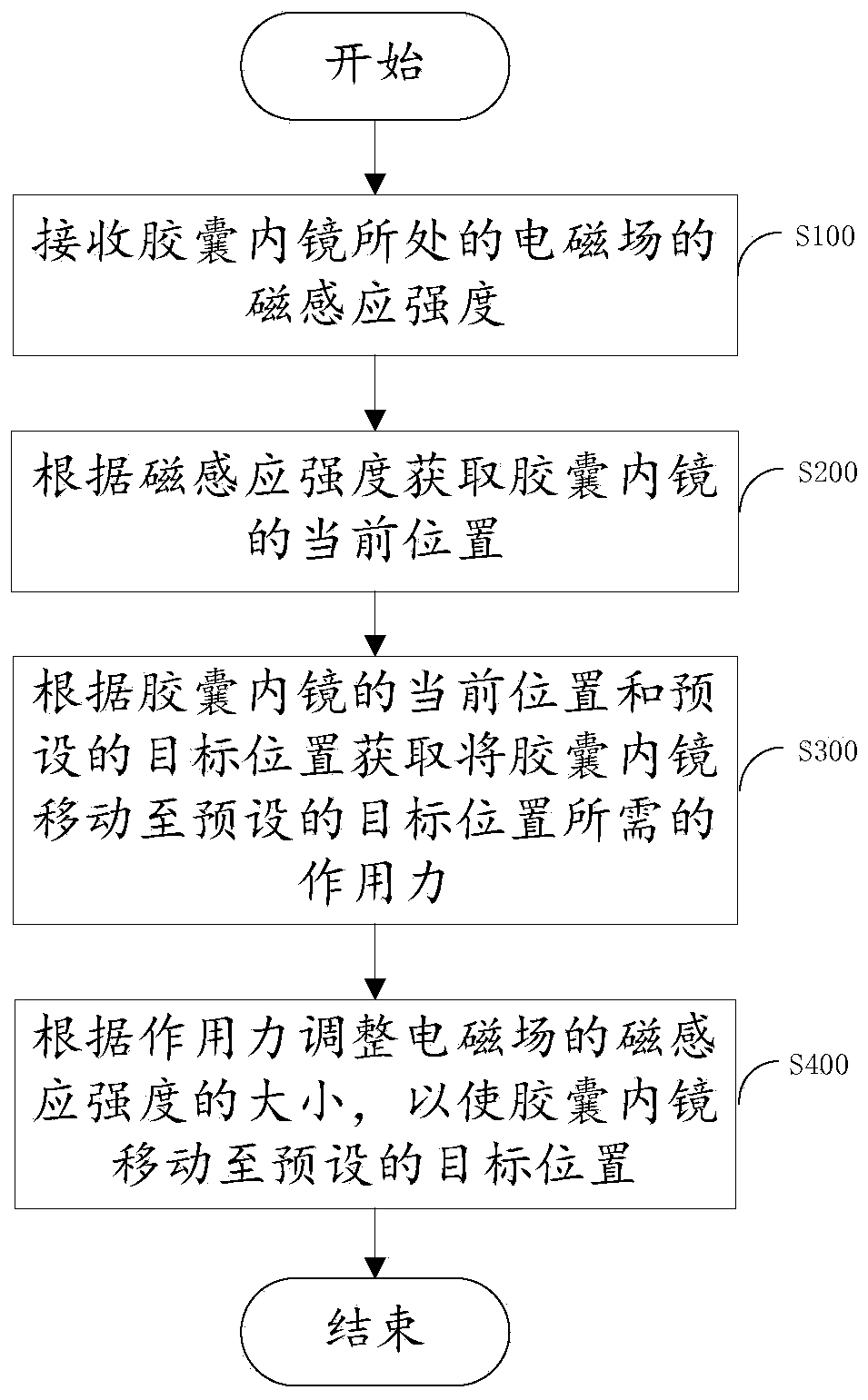
[0066] Please see figure 1 , figure 1 It is a flow chart of a suspension control method for a capsule endoscope provided in an embodiment of the present application. The method specifically may include the following steps:
[0067] Step S100: receiving the magnetic induction intensity of the electromagnetic field where the capsule endoscope 800 is located;
[0068] In the above implementation process, the capsule endoscope 800 is provided with a magnetic sensor, and the magnetic induction intensity of the electromagnetic field where the capsule endoscope 800 is located can be read through the magnetic sensor.
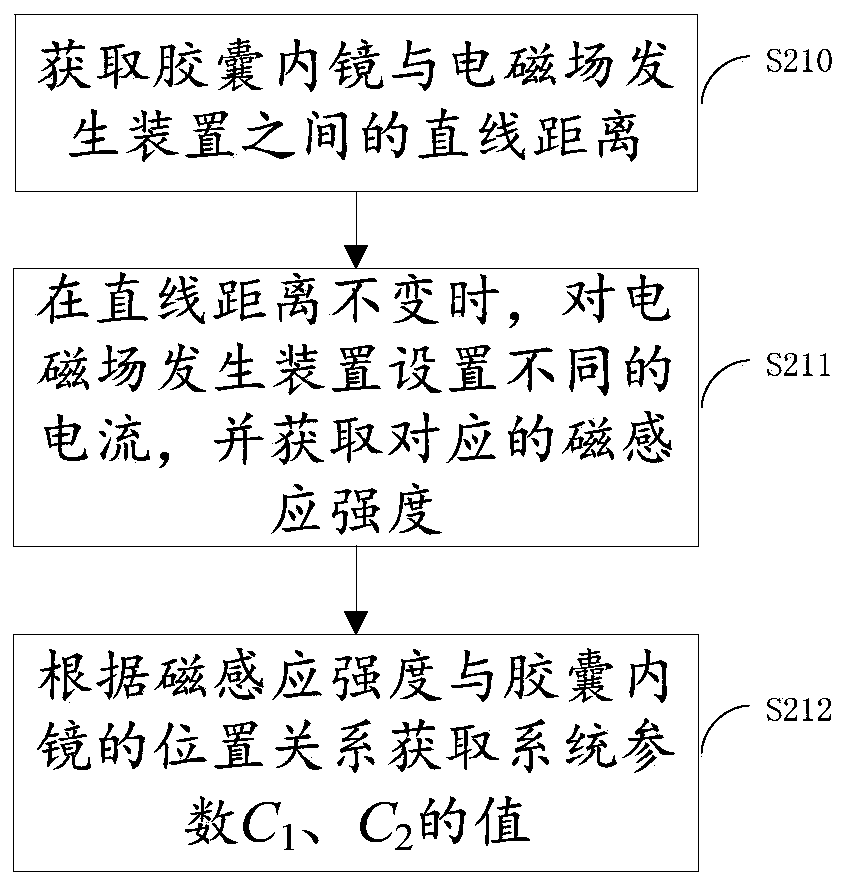
[0069] example, such as figure 2 Shown is a schematic flow chart of obtaining system parameters. Before the step S200 of acquiring the current position of the capsule endoscope 800 according to the magnetic induction intensity, the method further includes:
[0070] Step S210: Obtain the linear distance between the capsule endoscope 800 and the electromagnetic fiel...
Embodiment 2
[0107] The embodiment of the present application also provides a suspension control device for the capsule endoscope 800, such as Image 6 As shown, it is a structural block diagram of the suspension control device of the capsule endoscope 800 provided in the embodiment of the present application. Specifically, the device may include:
[0108] The magnetic induction receiving module 100 is configured to receive the magnetic induction of the electromagnetic field where the capsule endoscope 800 is located;
[0109] The current position acquiring module 200 is configured to acquire the current position of the capsule endoscope 800 according to the magnetic induction intensity;
[0110] The force acquisition module 300 is configured to acquire the force required to move the capsule endoscope 800 to the preset target position according to the current position of the capsule endoscope 800 and the preset target position;
[0111] The driving current applying module 400 is configur...
Embodiment 3
[0125] Such as Figure 8 As shown, it is a control flow chart of a method for controlling the suspension of the capsule endoscope 800 provided in the embodiment of the present application, through which the capsule endoscope 800 can be moved to a preset target position, and may include the following steps:
[0126] Step 1: Read the magnetic induction intensity of the electromagnetic field where the capsule endoscope 800 is located through the magnetic sensor;
[0127] Step 2: Calculate relevant data of the current position of the capsule endoscope 800 according to the magnetic induction intensity;
[0128] Step 3: The current position data of the capsule endoscope 800 is filtered by the Bagworth filter, and then transmitted to the PID controller; wherein, the stability of signal transmission can be increased after being filtered by the Bagworth filter.
[0129] Step 4: The PID controller calculates the magnetic force required to move the capsule endoscope 800 to the preset ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com