

Vision-based robot automatic calibration method, equipment and storage medium
An automatic calibration and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as troublesome and cumbersome operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
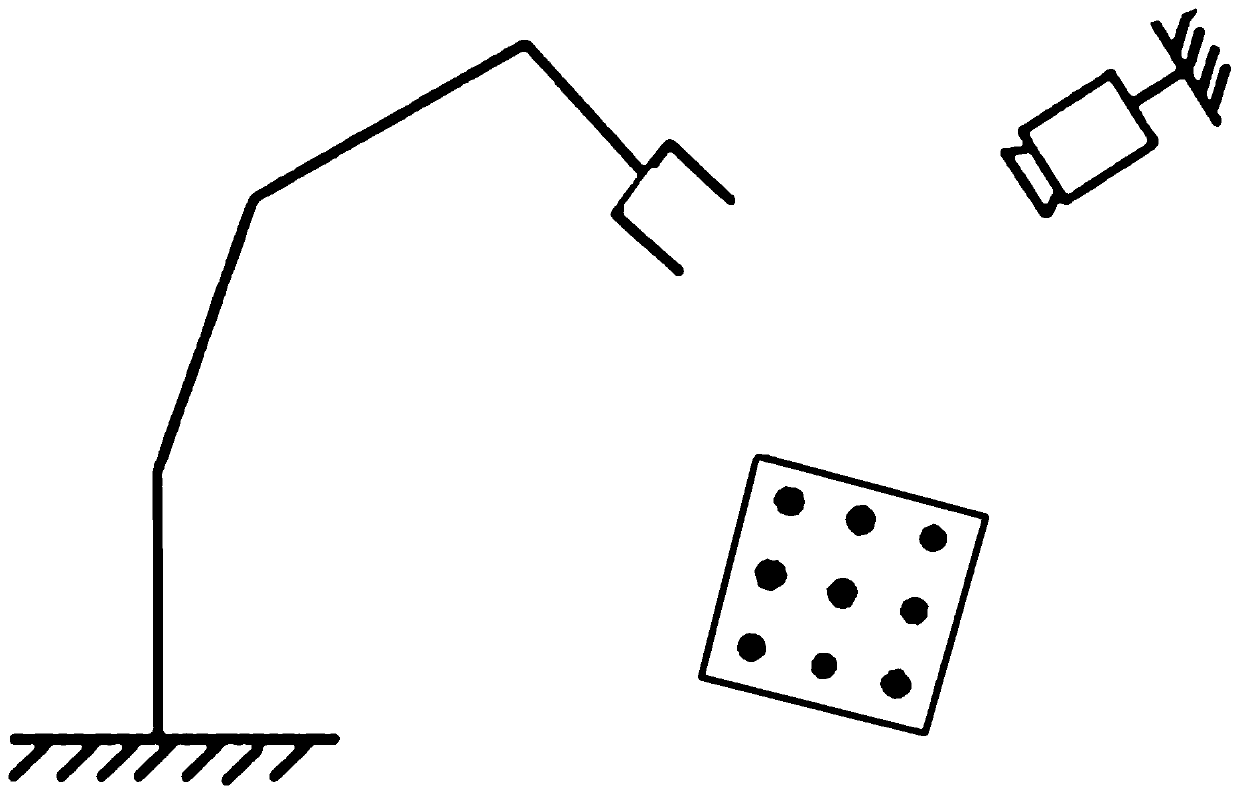
[0045] This embodiment discloses a vision-based automatic calibration method for a robot. The calibration method needs to use a robot, a camera and a MARK point. The MARK point is fixed at the end of the robot (that is, the action execution end of the robot), refer to figure 2 As shown, the MARK point "+" is set on the marking plate 2, and the marking plate 2 is installed at the end of the robot. In actual use, the marking plate 2 can be fixed at the end of the robot by pasting or negative pressure adsorption. Among them, the MARK point is set according to the requirement that it is at the same level as the detected workpiece. The position of the above-mentioned camera is fixed, and the movement of the above-mentioned robot makes the MARK point move in the camera field of view. The above-mentioned camera is used to observe the attitude of the MARK point and record the pixel coordinates of the MARK point in the camera coordinate system.
[0046] After introducing the MARK poi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More