

Wing-deformation-based control mechanism of hummingbird-imitation flapping-wing unmanned aerial vehicle
A technology of unmanned aerial vehicle and control mechanism, which is applied in the direction of aircraft, aircraft control, aircraft parts, etc., can solve the problems of lack of control mechanism, inability to achieve full attitude control, and inability to generate a large enough torque control angle to achieve the effect of light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following content is a specific implementation manner of the present invention, but this manner does not limit the present invention itself in any form. It is worth pointing out that within the framework of the core content of the present invention, improvements to the partial details or specific implementation of the present invention still belong to the scope of protection of this patent.
[0028] The present invention will be described in more detail below in conjunction with the accompanying drawings.
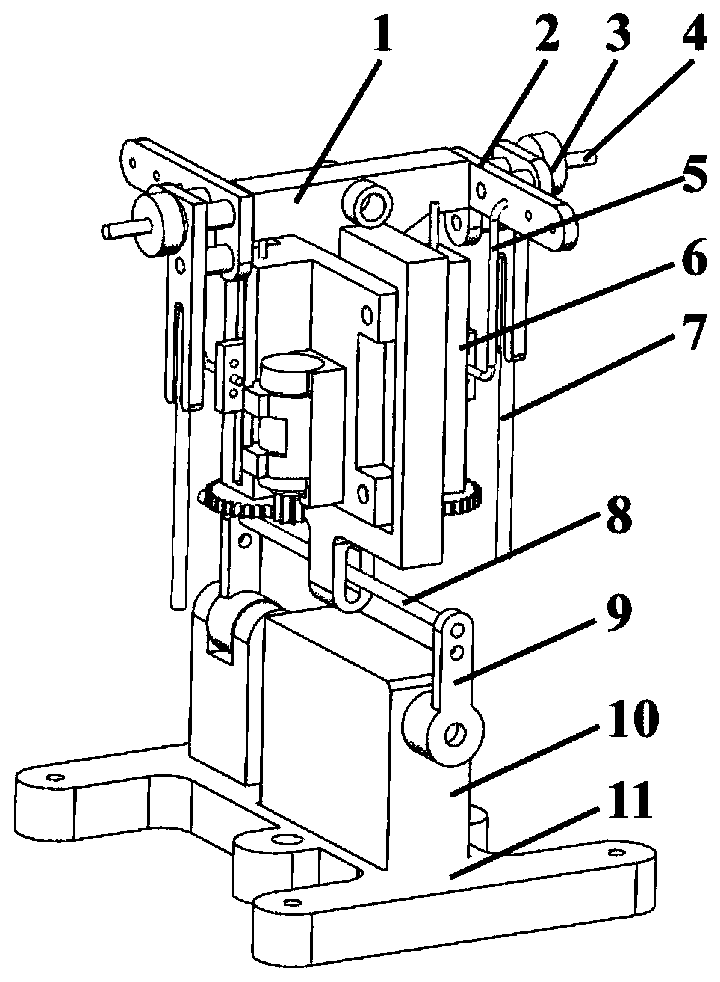
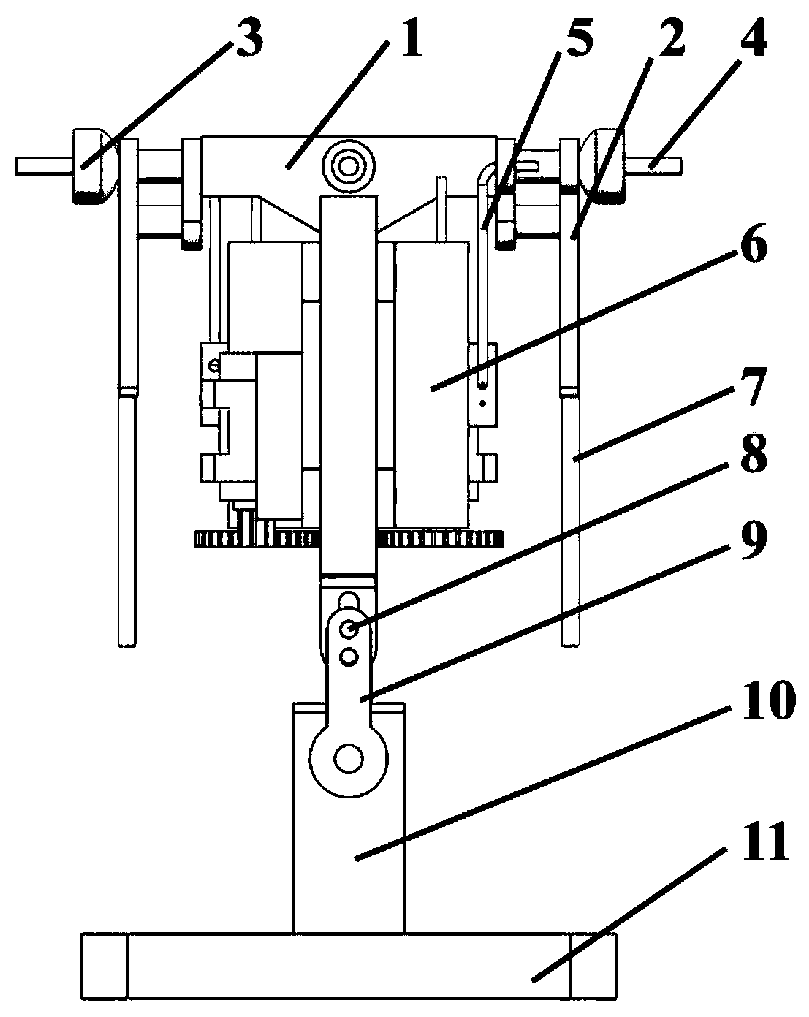
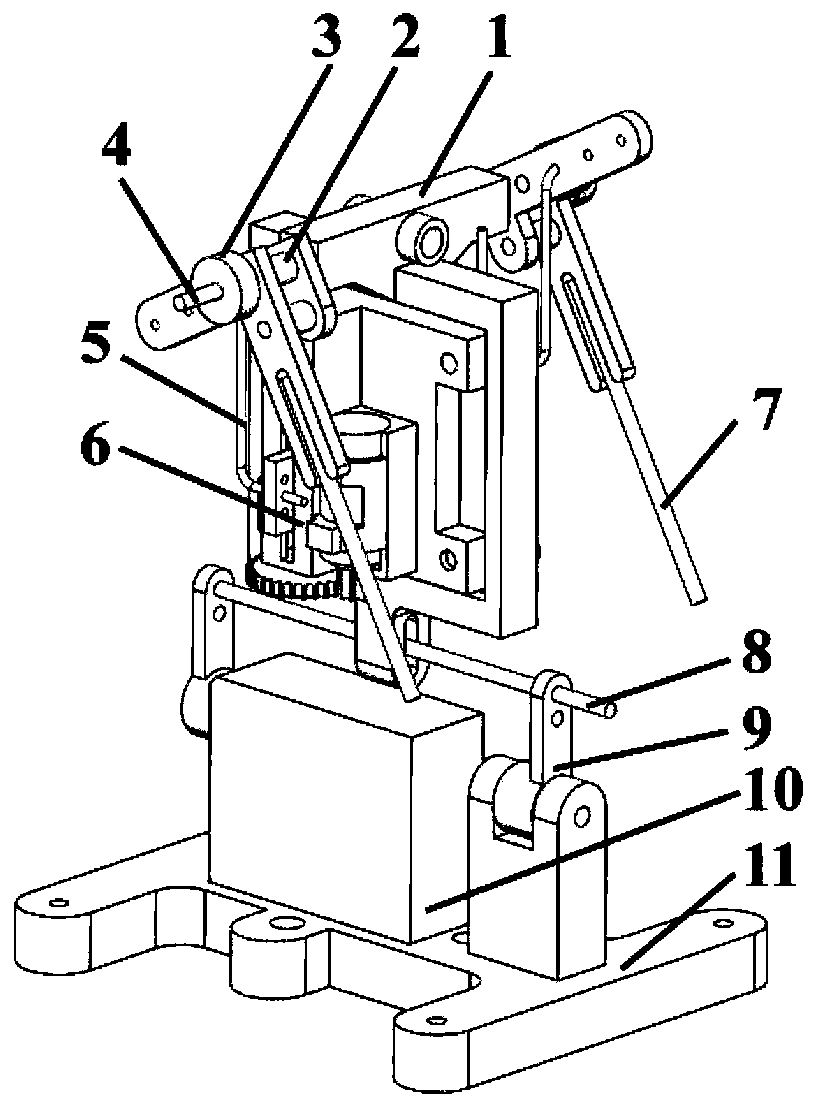
[0029] Such as figure 1 and figure 2 Shown based on the control mechanism of the imitation hummingbird flapping wing UAV based on wing deformation, the control mechanism includes a rotating steering gear base 11 (see the specific structure Figure 7 ) and the rotating steering gear 10 fixed on it, this part is connected with the flapping wing driving mechanism through 4 cylindrical holes at the bottom, a rotating steering gear rocker arm 9 is respectively fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More