Controlling method, robot, and computer storage medium
A control method and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor stability and poor flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions in the embodiments of the present application will be clearly and completely described below in conjunction with the drawings in the embodiments of the present application. It can be understood that the specific embodiments described here are only used to explain the application, but not to limit the application. In addition, it should be noted that, for ease of description, the drawings only show a part of the structure related to the present application instead of all of the structure. Based on the embodiments in this application, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of this application.
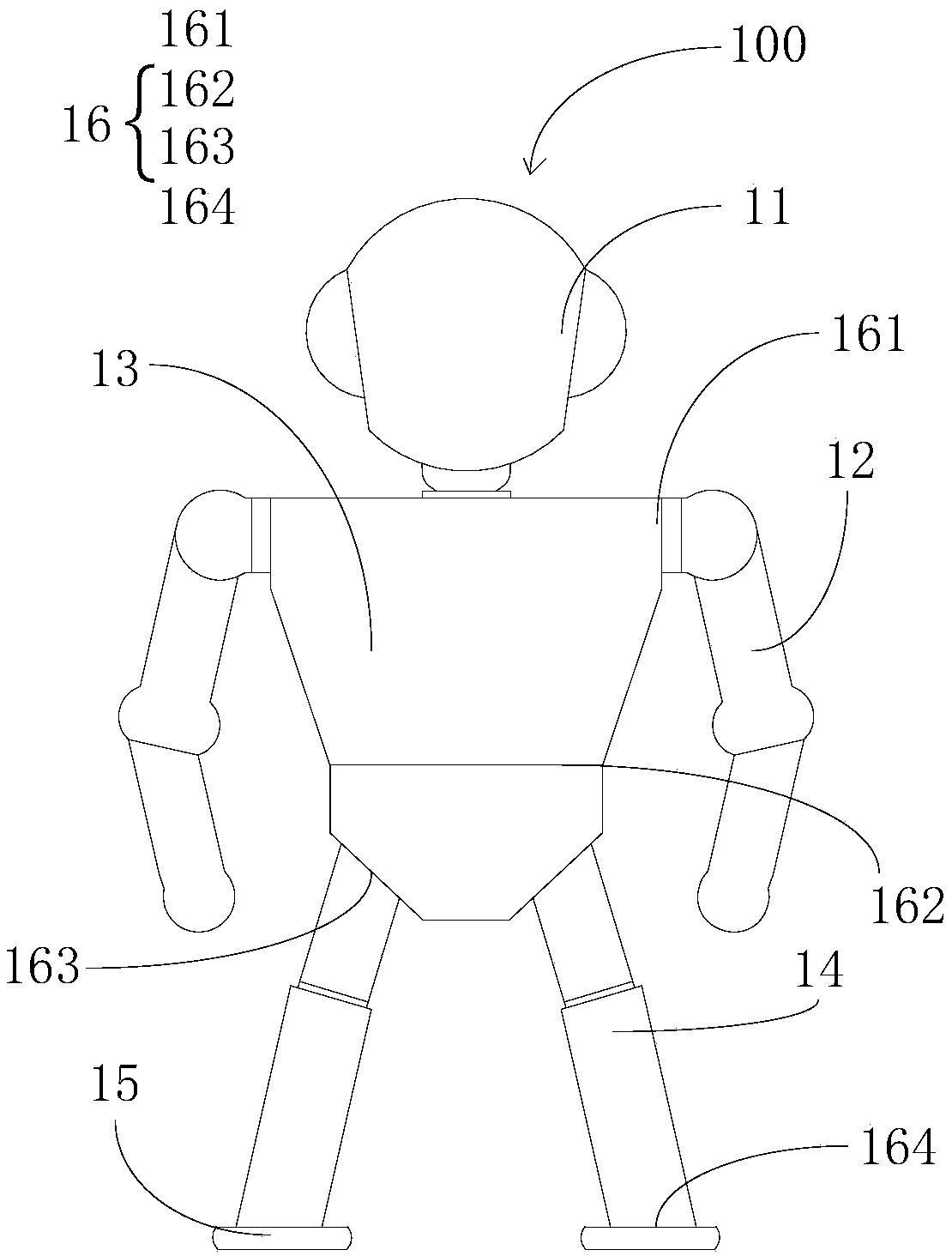
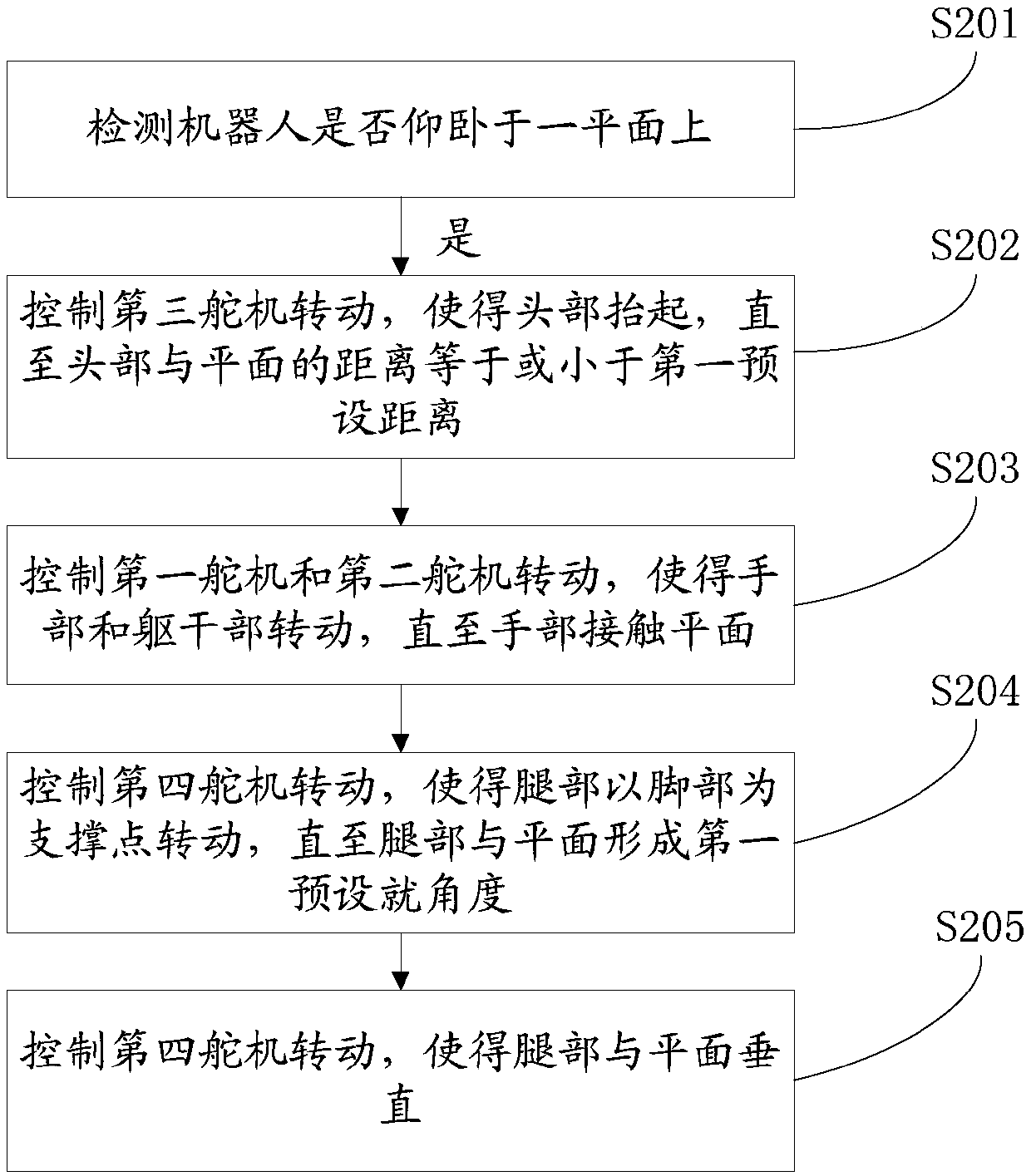
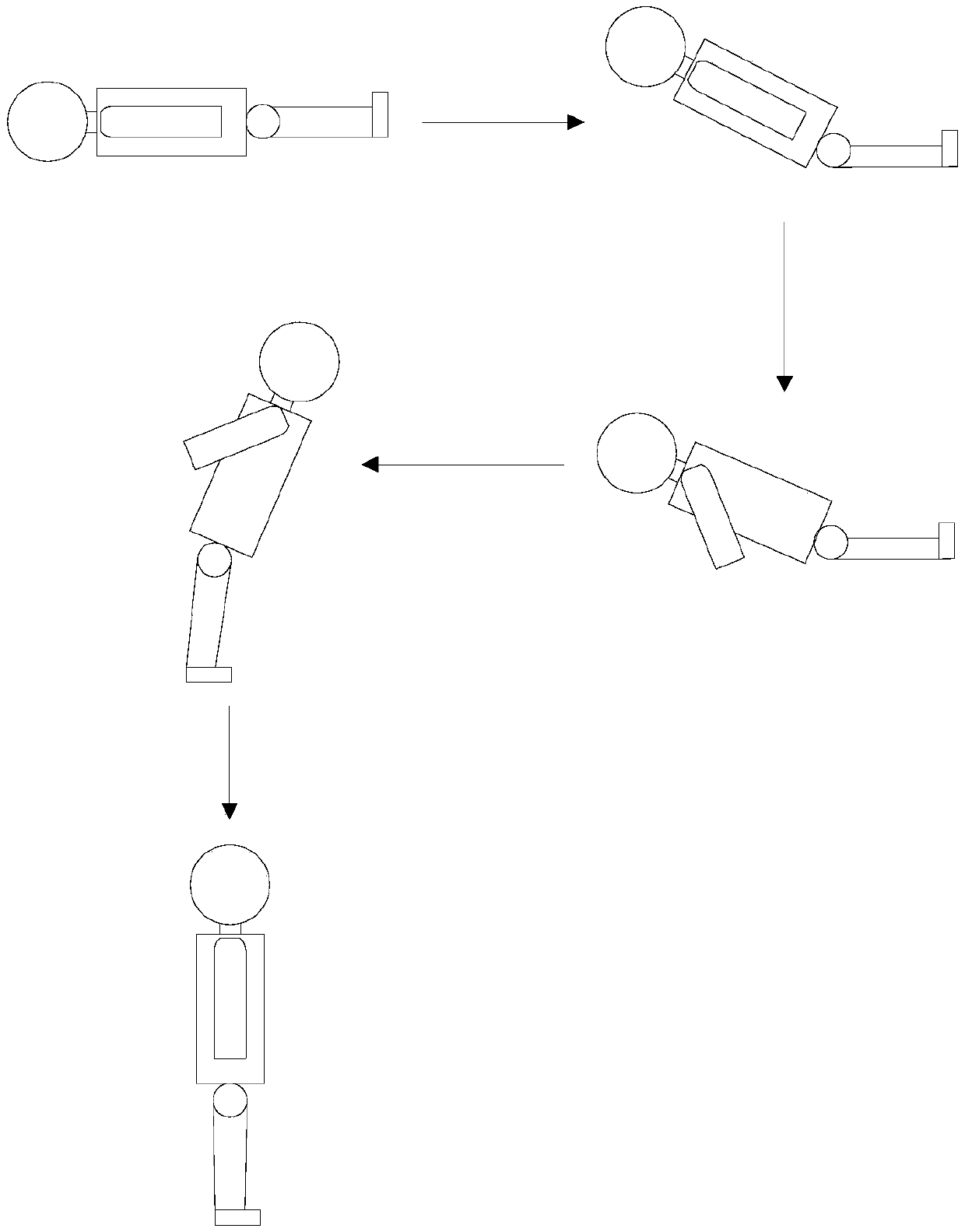
[0018] See Figure 1 ~ Figure 3 , figure 1 Is a schematic structural diagram of an embodiment of the robot of the present application, figure 2 It is a schematic flow chart of Embodiment 1 of the control method of this application, image 3 Yes figure 2 Schematic diag...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap