

Human-computer cooperative robot tooth-implant method and human-computer cooperative robot tooth-implant system based on augmented reality
A technology of human-machine collaboration and augmented reality, applied in dentistry, dental implants, manipulators, etc., can solve the problems of insufficient flexibility of dental implant surgery, unintuitive navigation and implantation, and high labor intensity of doctors, so as to achieve enhanced coordination of surgery and flexible solutions Sexual insufficiency, the effect of reducing dependence on doctor experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
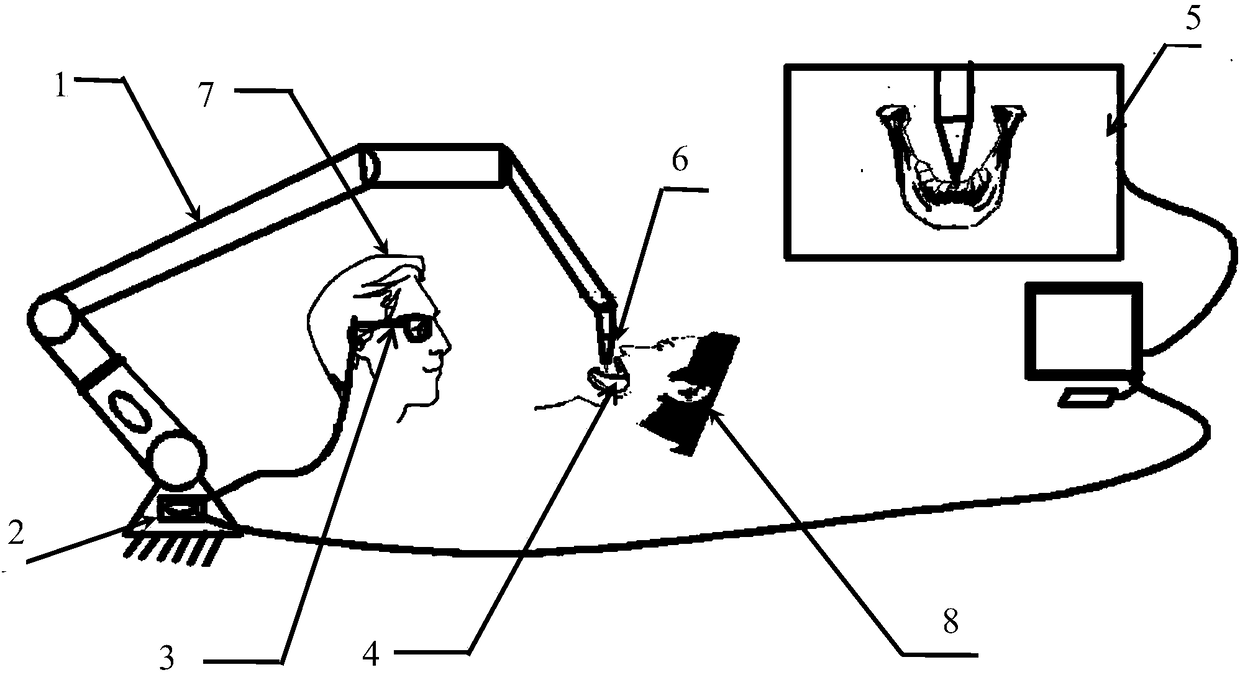
[0040] refer to Figure 1 to Figure 7 , a dental implant method based on augmented reality technology, comprising the following steps:
[0041] (1) Data acquisition
[0042] Obtain the oral CT data of patient 8, the CT slice thickness is not greater than 1 mm, and save it in DICOM data format; take an oral impression to obtain a plaster model, and scan the plaster model to obtain the data of the patient's inner oral surface, or directly use an intraoral scanner to scan the patient The oral cavity is scanned to obtain the data of the inner surface of the patient's mouth;
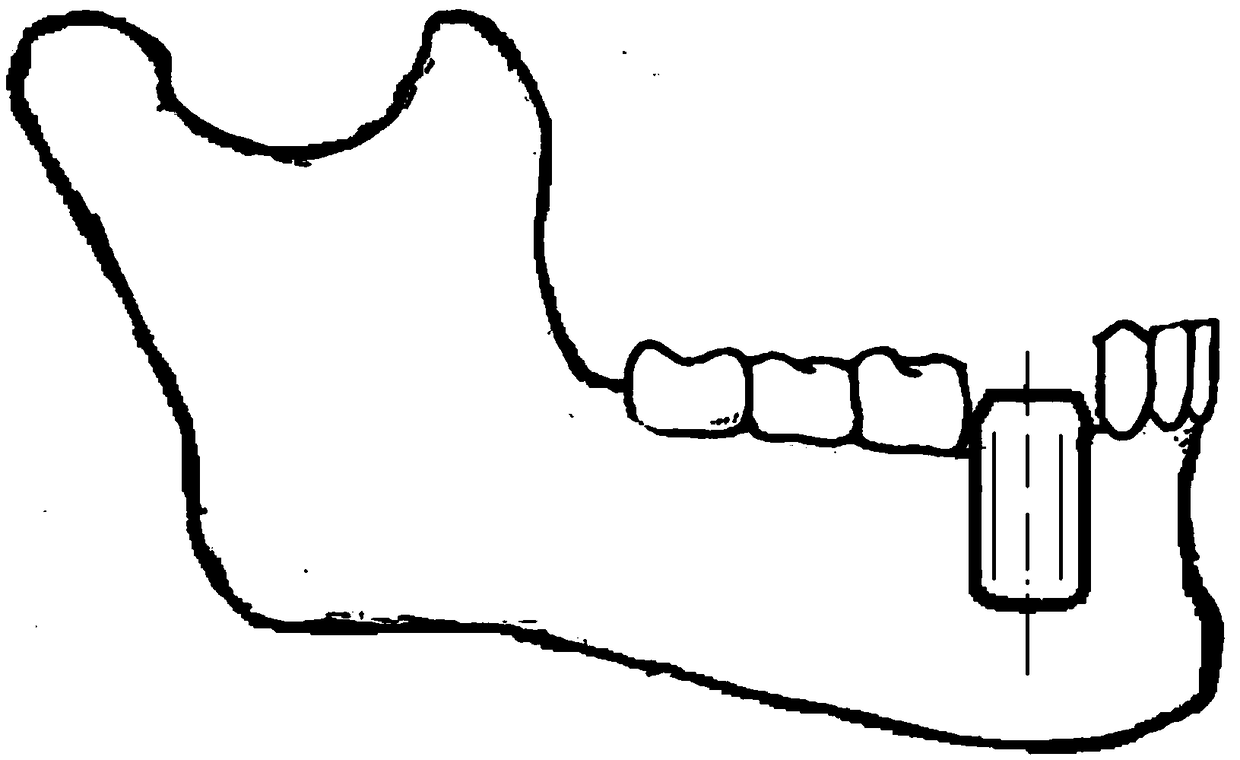
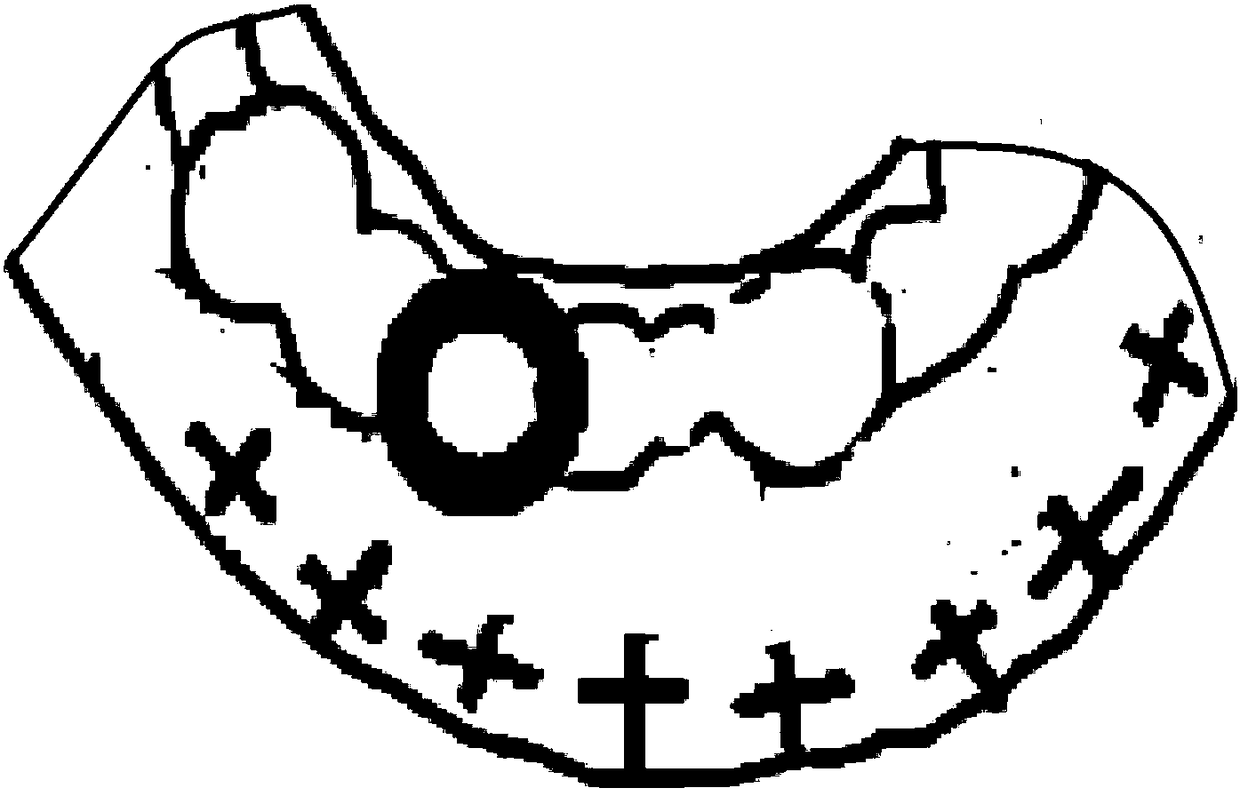
[0043] (2) Three-dimensional reconstruction to obtain oral tissue model
[0044] Use medical image processing software such as MIMICS to process the CT data of the patient’s oral cavity to obtain the reconstructed 3D jaw and tooth models; use triangle mesh processing software such as Geomagic to proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More