

Greedy strategy based flight path planning method for unmanned aerial vehicle
A technology for unmanned aerial vehicles and track planning, applied in the field of navigation calculations, can solve problems such as the limitation of the turning radius of the aircraft, the failure of calibration points, etc., and achieve the effect of speeding up planning and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
[0057] The track planning method of the unmanned aerial vehicle based on the greedy strategy in the present embodiment comprises the following steps: as attached figure 1 And attached figure 2 Shown:
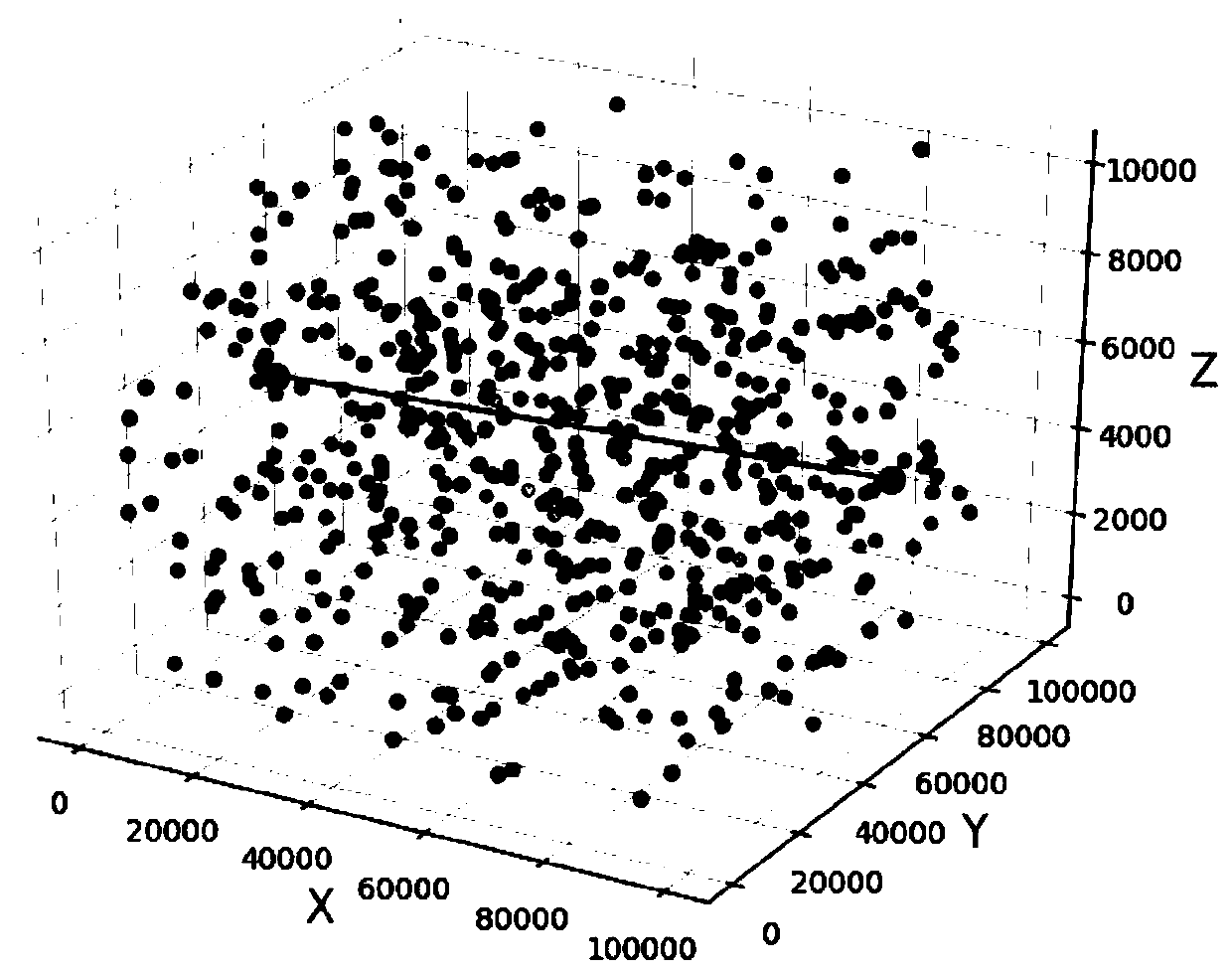
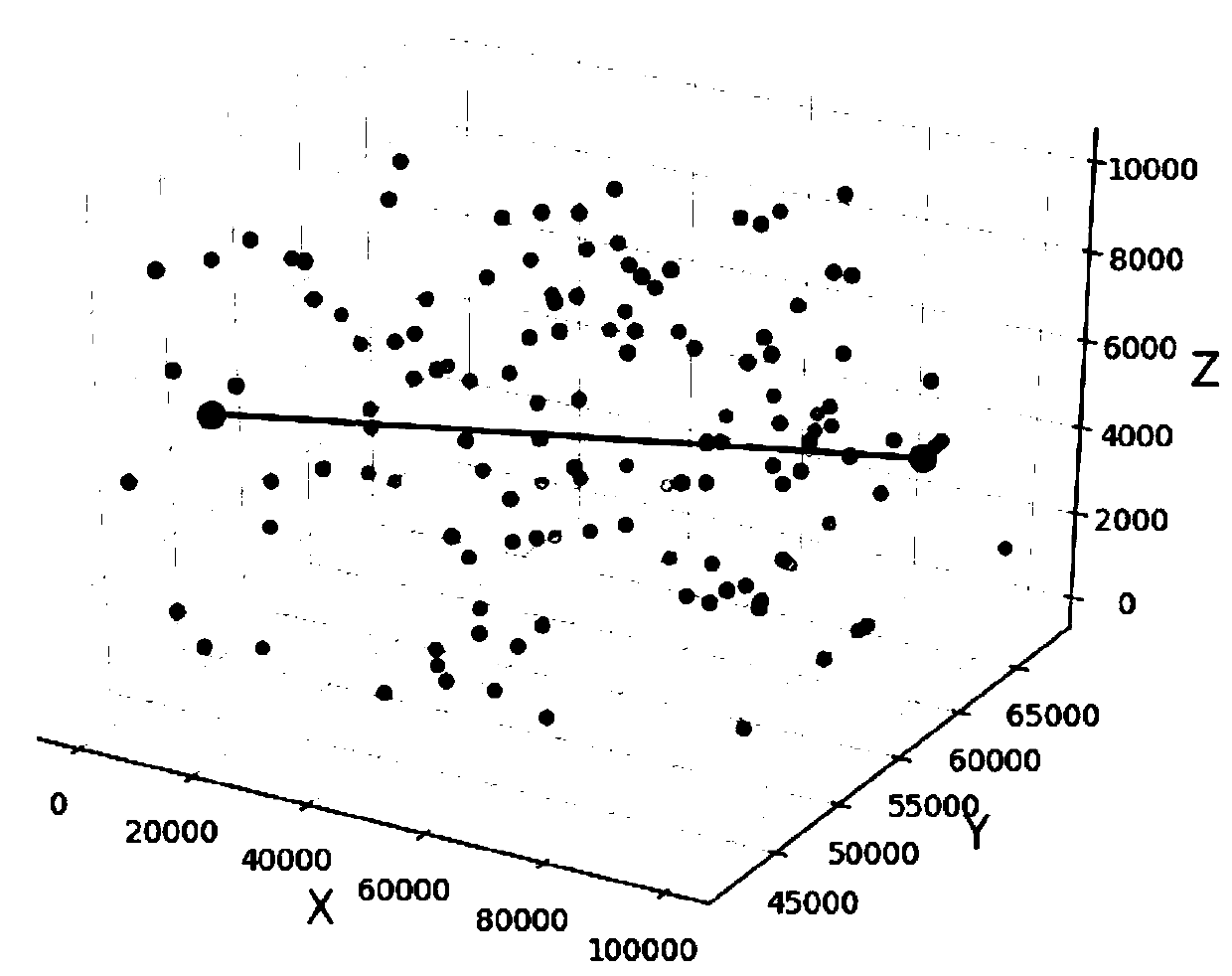
[0058] S1: Obtain the original data set, and preprocess the original data set to obtain the dimensionality reduction data set, the starting point A, the first destination point B, and the horizontal measure d. The preprocessing includes data set visualization and data dimensionality reduction processing;
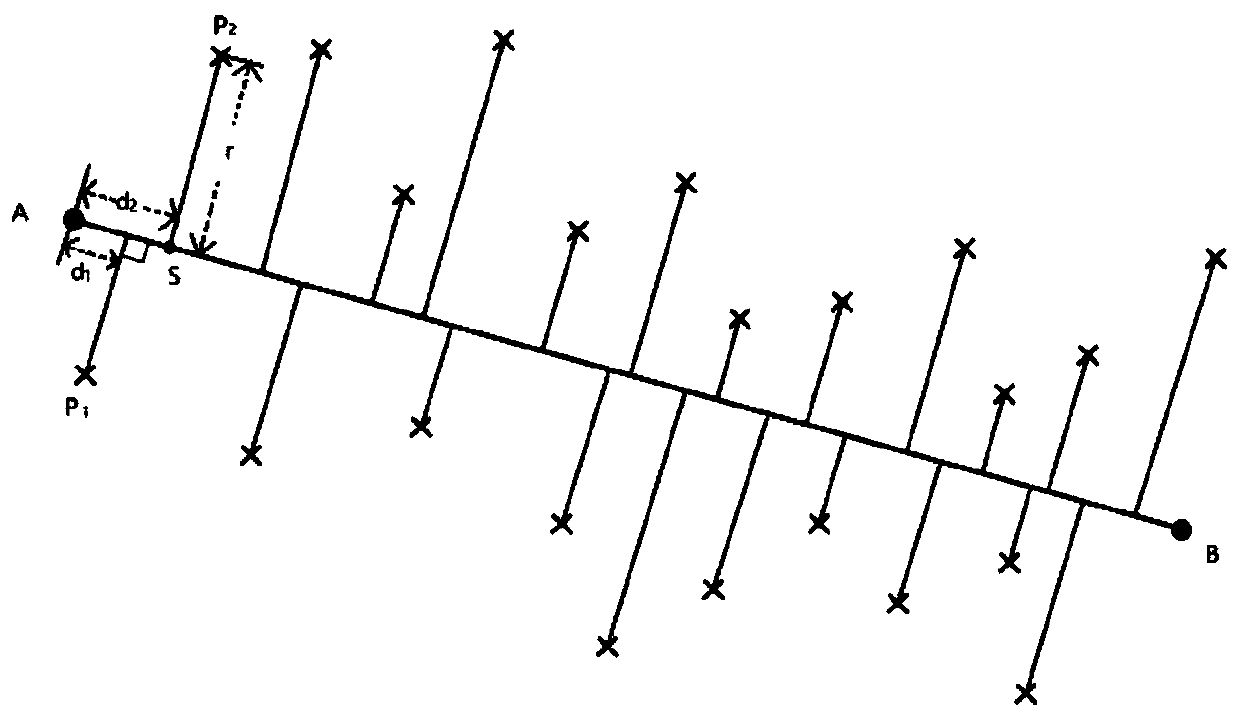
[0059] S2: Starting from the starting point A, sequentially follow the spatial point set X={x sorted by the horizontal measure d 1 ,x 2 ,...,x t ,x t+1 ,...,x n}X={x 1 , x 2 ,...,x t , x t+1 ,...,x n} to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More