

Tail-end load compensating method dragged by multi-degree-of-freedom cooperation robot
A robot and load force technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low cost, only the end of the robot can be dragged, and only point drag can be achieved, and the effect of improving lightness can be achieved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the implementation cases of the present invention will be clearly and completely described below with reference to the implementation cases of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of the present invention.
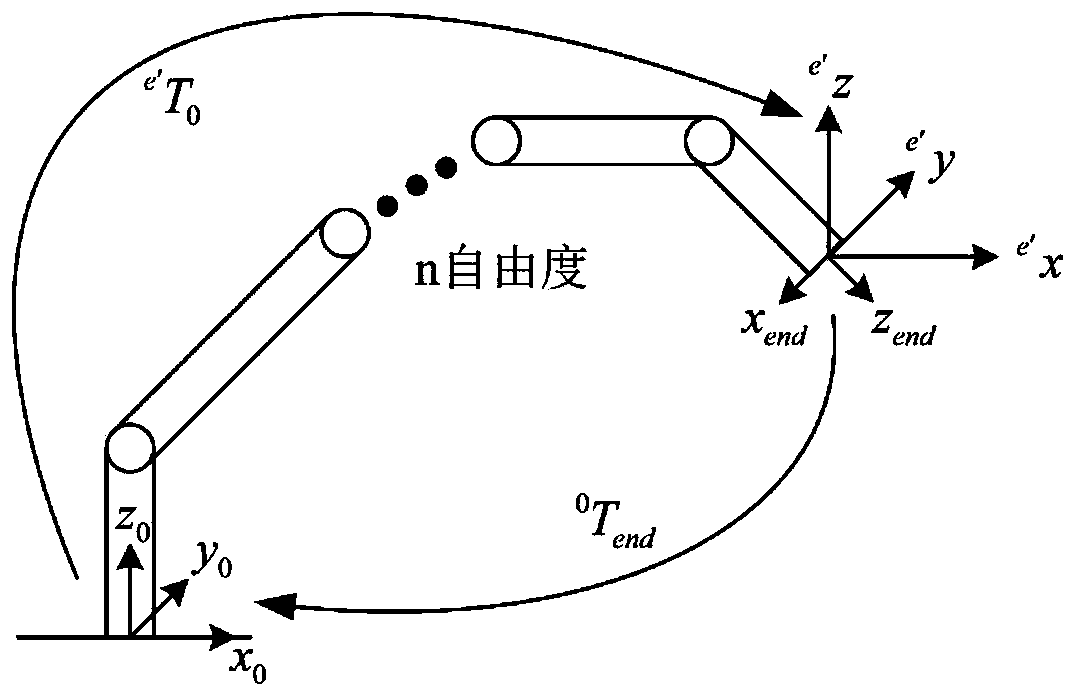
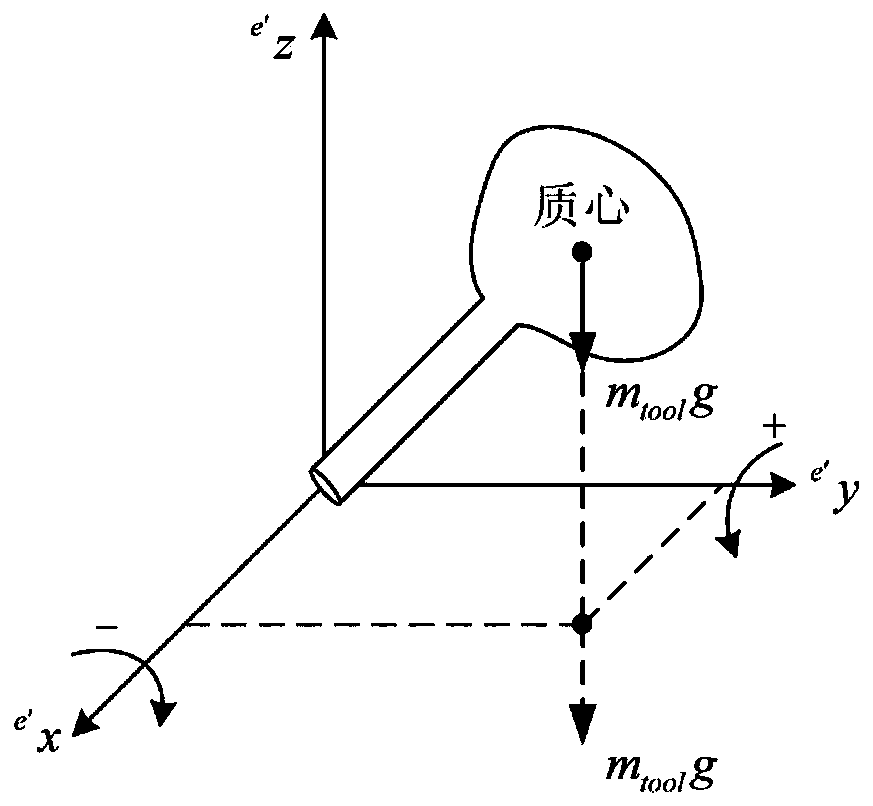
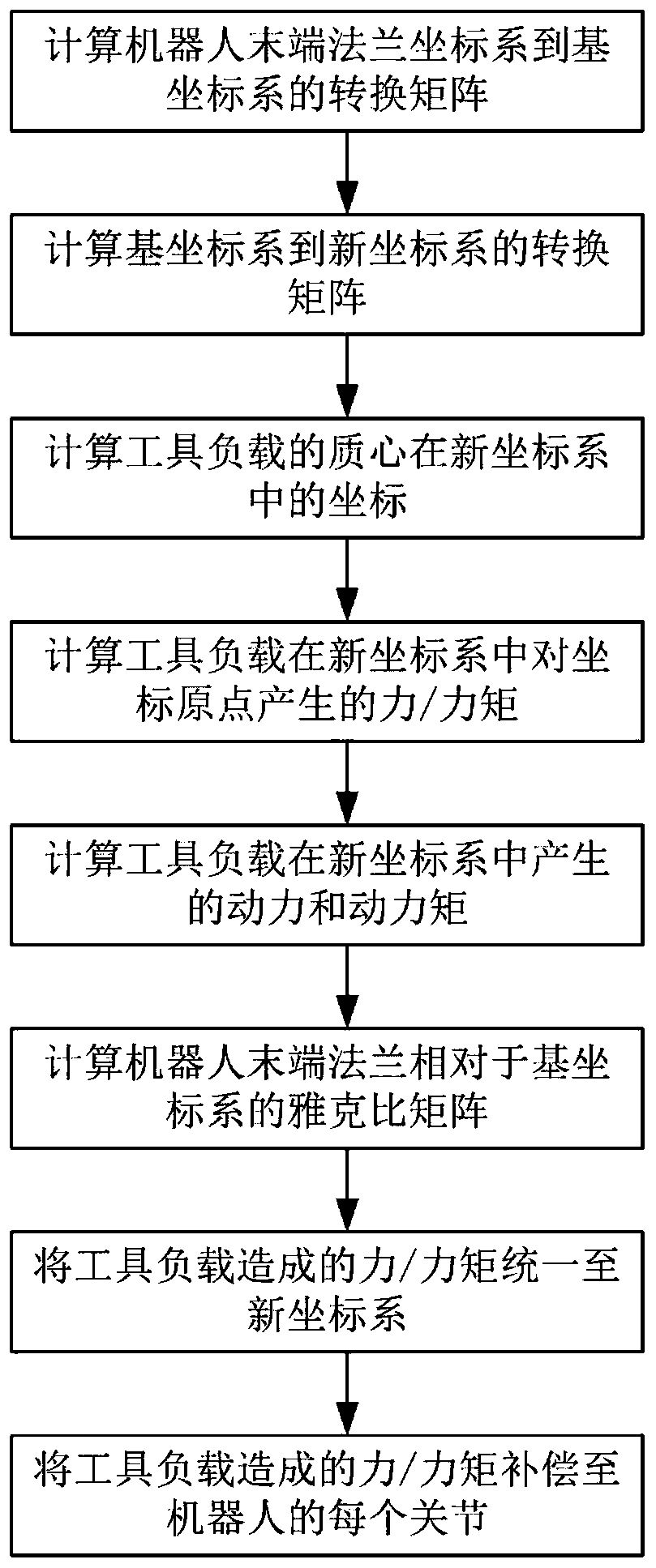
[0034] The present invention provides a method for compensating load force / torque of a robot end tool, comprising the following steps:
[0035] Step S1, corresponding to the process image 3 , to establish the mathematical model of the force and moment of the robot end flange, the model is as follows:
[0036]
[0037] In the formula, F end and T end The external force on the flange of the robot end, including the static force F generated by the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More