Collision detection method of closed-loop mechanical arm system based on momentum observer
A technology for collision detection and robotic arms, applied in the field of robotics, to achieve the effects of high flexibility, avoidance of high-frequency noise, and low time delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to better illustrate the purpose and advantages of the present invention, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
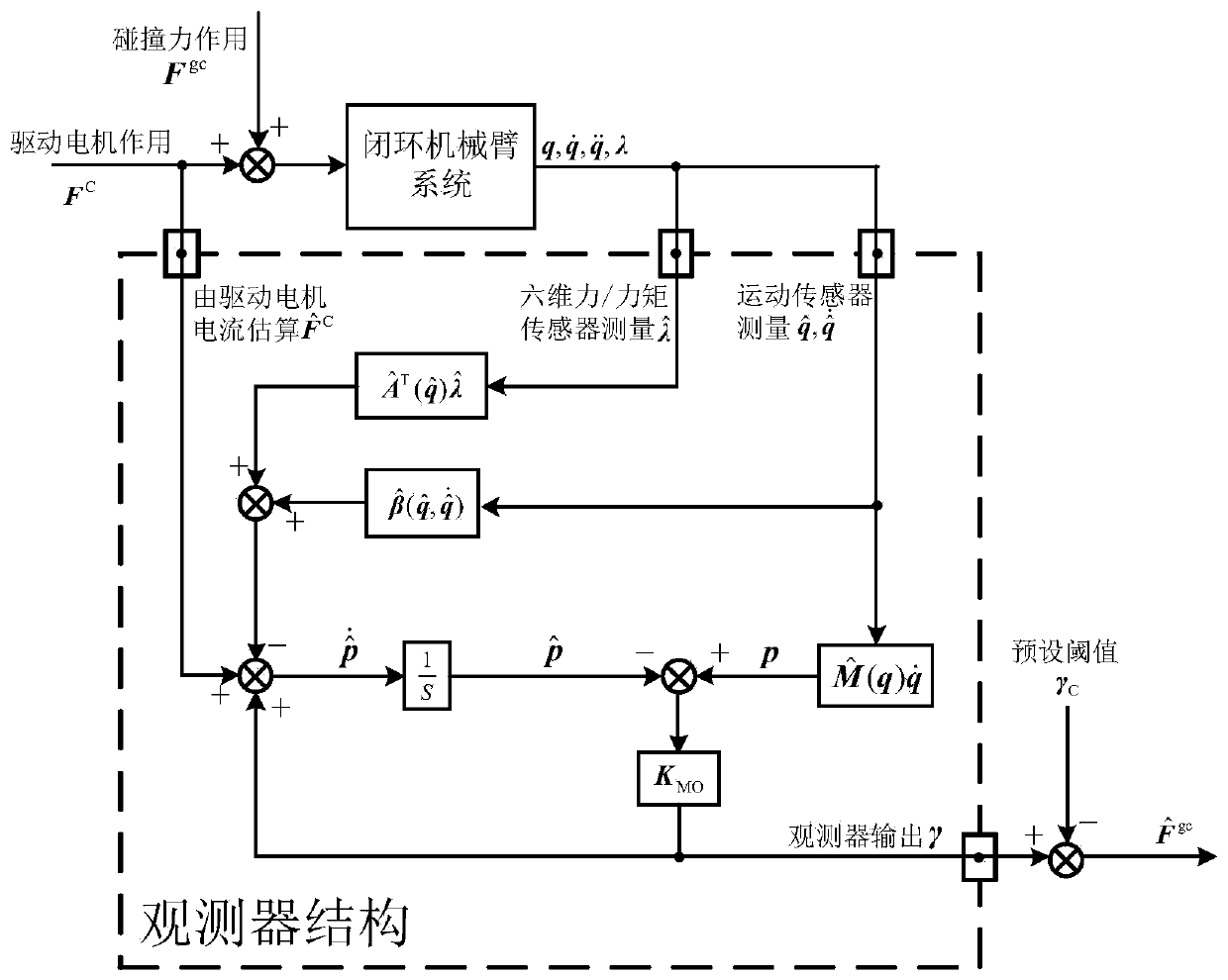
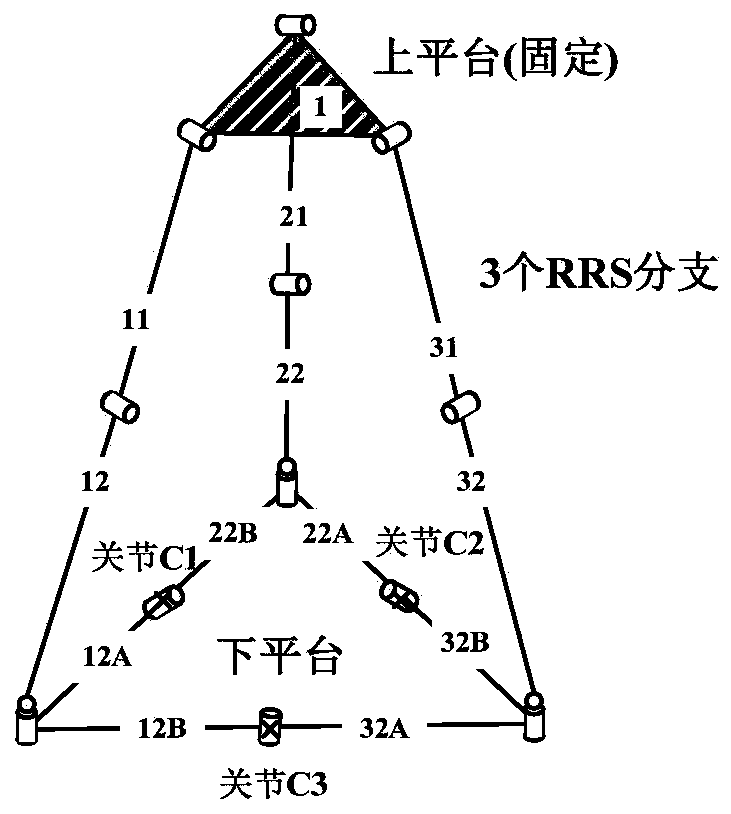
[0038] figure 1 It is a schematic diagram of the momentum observer structure and the collision detection method disclosed in the present invention. The structure of the closed-loop manipulator system described in this embodiment is shown in figure 2 , the upper platform is fixed in space, the lower platform is a Bricard mechanism, which is composed of 6 arms, (number 12A, 12B, 22A, 22B, 32A, 32B) the angle between adjacent joints is 30deg; 3 RRS branches are connected, containing 6 arms (11, 12, 21, 22, 31, 32). All arms in the closed-loop robotic arm system are homogeneous straight rods with a length of 0.5 m and a mass of 0.6 kg.
[0039] A closed-loop manipulator system collision detection method based on a momentum observer disclos...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap