

Unmanned aerial vehicle group cooperative safety control method based on switching topology
A technology of safety control and safety controller, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve problems such as task execution obstruction, safety distance change, communication link blockage, etc., and achieve relief The effect of network transmission stress
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0054] The present invention designs a UAV group cooperative safety control method based on switching topology, the steps are as follows:
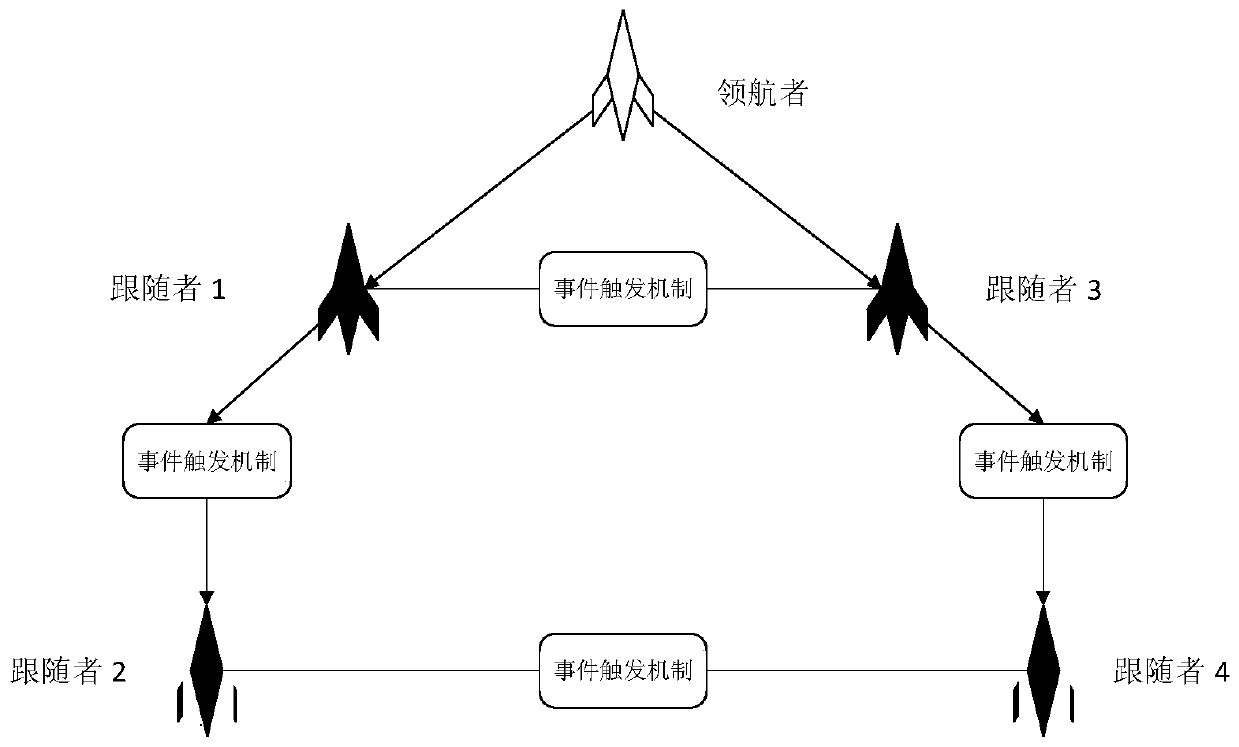
[0055] Step 1: Introduce graph theory and use the time-varying switching topology graph to represent the information interaction between the UAV groups in each switching subsystem, including the information transmission from the leader UAV to the follower UAV and the follower UAV Information communication between machines; a switching subsystem is a UAV swarm communication topology corresponding to a task or environment;
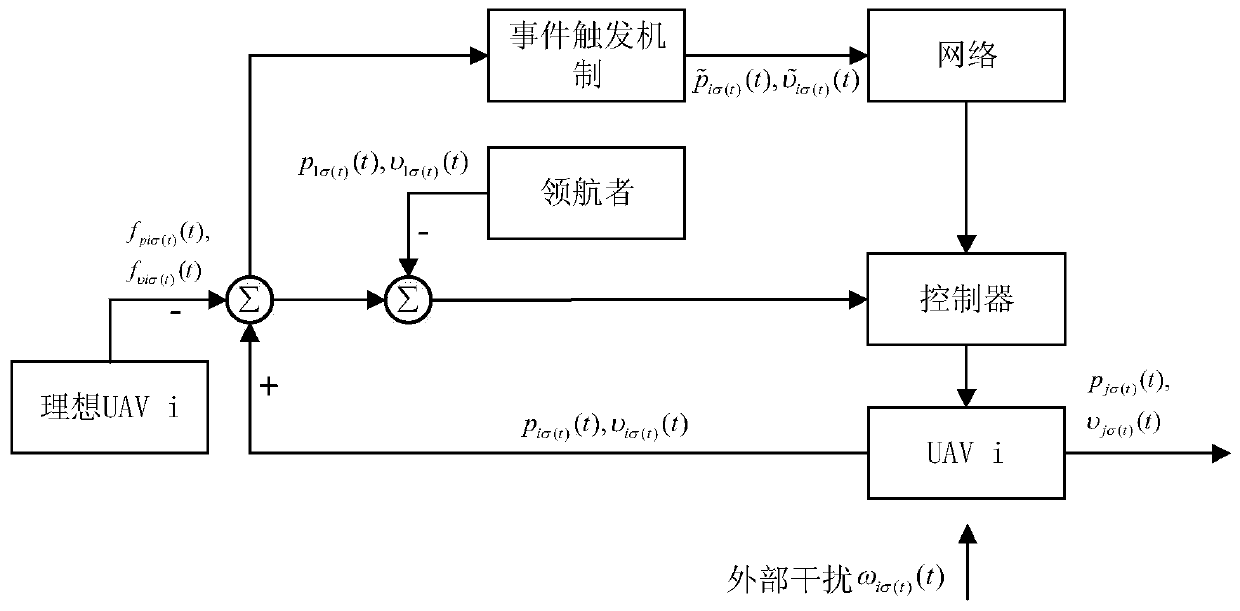
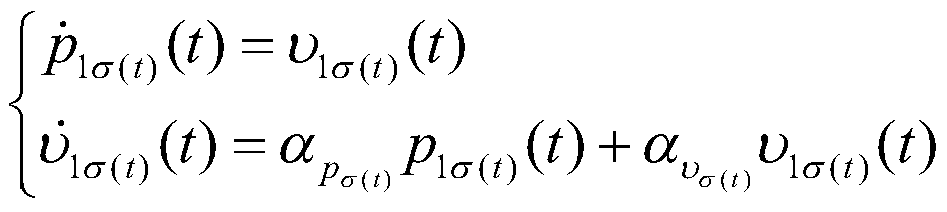
[0056] Step 2: Establish the second-order dynamics model of the UAV leader in the switching subsystem, which is used to provide the movement trajectory of the UAV swarm during flight; considering the influence of external disturbances, establish the second-order dynamics model of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More