

Soft skeletal muscle driver based on ferrofluid and electromagnetic coil
A ferrofluid and electromagnetic coil technology, applied in the field of bionic robots, can solve problems such as difficult control and unfavorable portability, and achieve the effects of increasing pressure, simple circuit and increasing system volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
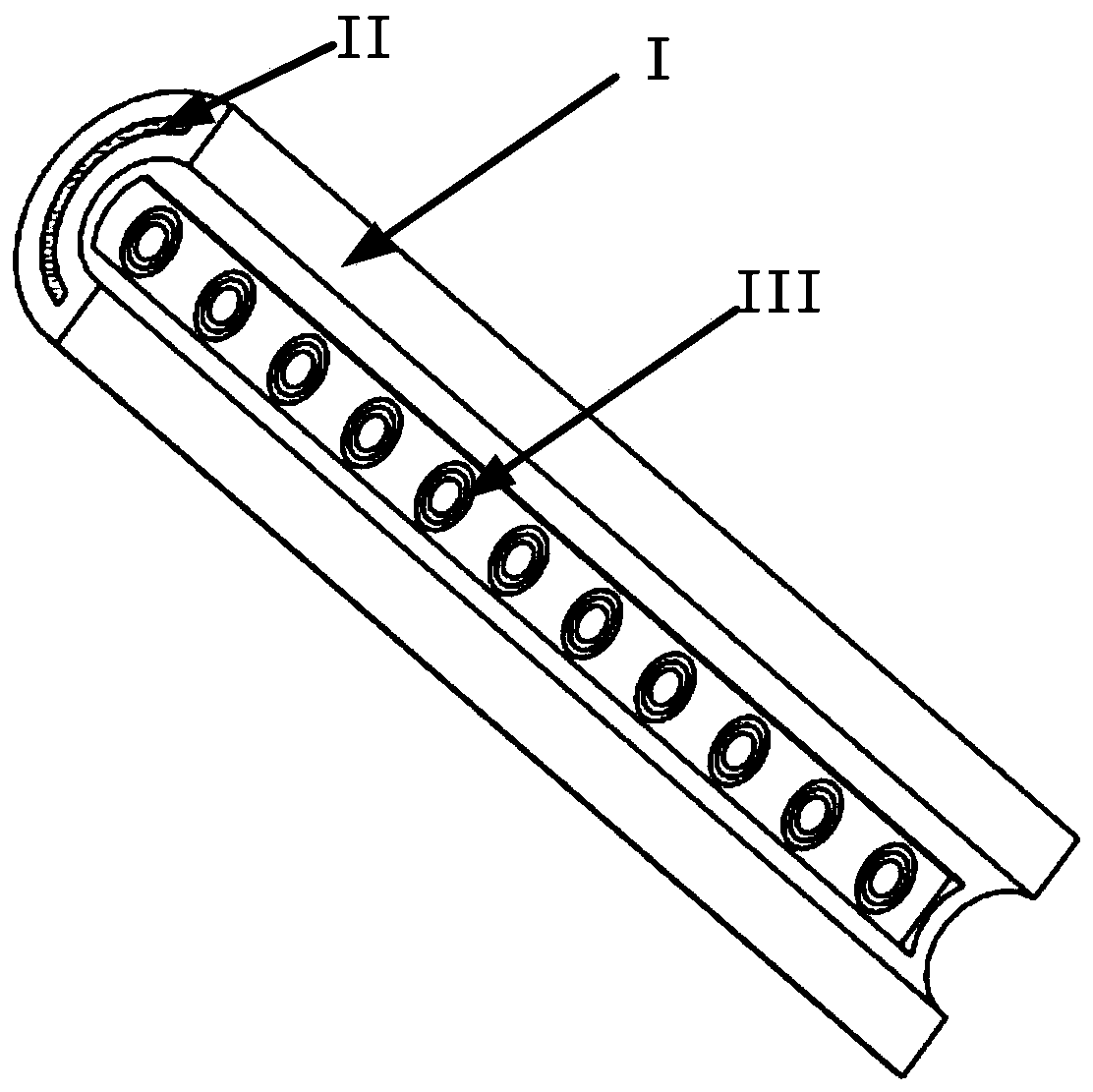
[0013] The described soft skeletal muscle driver based on ferrofluid and electromagnetic coil, the outside is a cylinder (such as figure 1 ) or semi-cylindrical shape, which can realize the bending function under pressure.
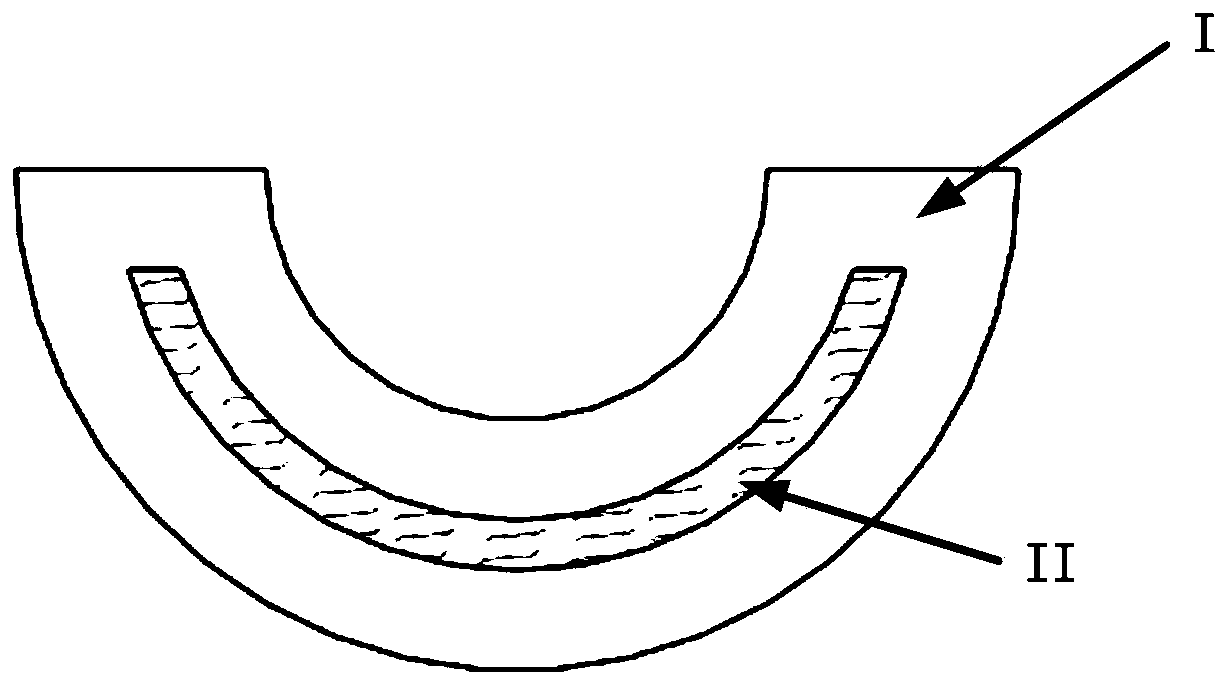
[0014] The described soft skeletal muscle driver based on ferrofluid and electromagnetic coil, its specific embodiment is as follows figure 2 As shown, it mainly includes artificial skeletal muscle I, ferrofluid II and electromagnetic flexible coil III.
[0015] The ferromagnetic material is filled inside the skeletal muscle of the artificial elastic fiber material, which can flow freely and gather in various positions, such as image 3 shown.
[0016] The interior of the artificial elastic fiber skeletal muscle is a hollow tube with a grid structure, such as Figure 4 As shown, the lightweight design can be realized under the premise of meeting the stress requirements.
[0017] The soft skeletal muscle driver based on ferrofluid and electromagnetic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More