

Video depth map estimation method and device with space-time consistency
A depth map and consistency technology, applied in the field of geometric information understanding of video scenes, can solve problems such as poor generalization, high cost, and ineffective processing, and achieve the effects of increasing relevance, improving accuracy, and improving excessive errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
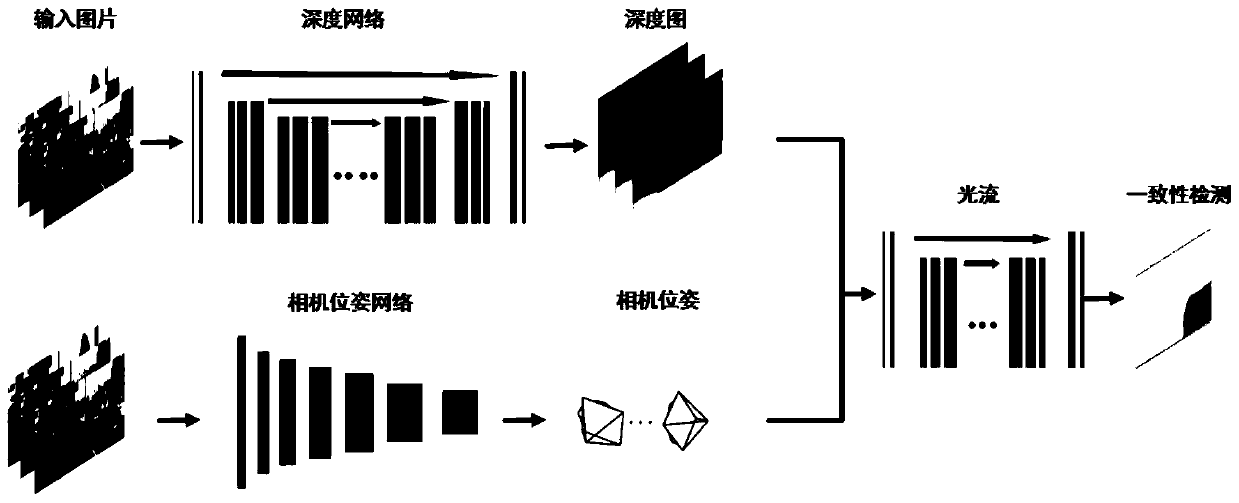
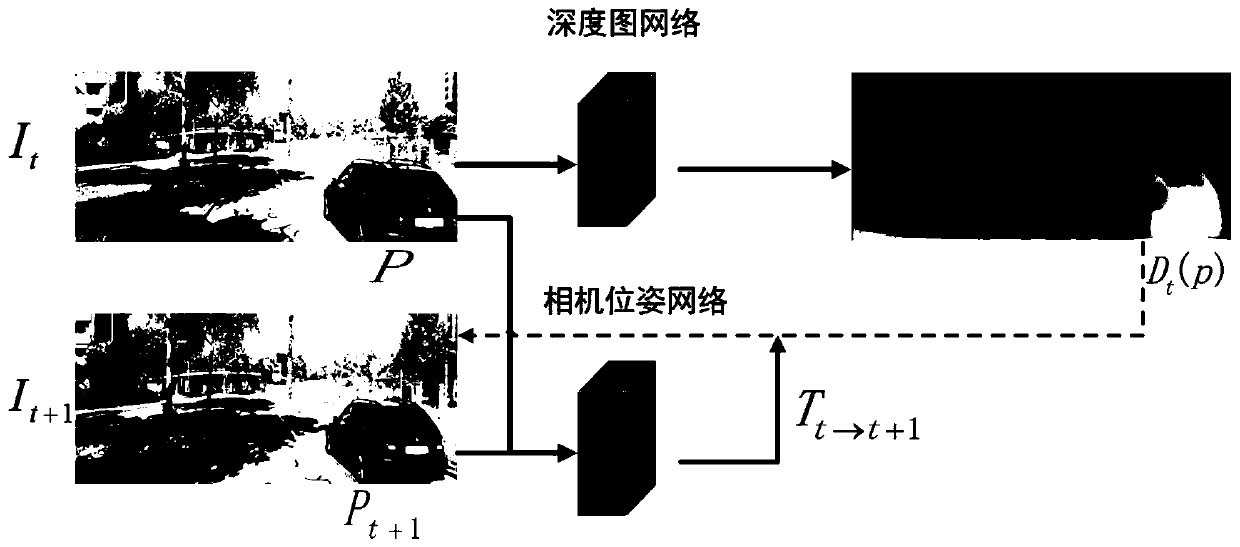
[0019] The present invention provides a method for estimating a video depth map, which combines depth estimation, optical flow estimation, and camera pose estimation through the geometric characteristics of a moving three-dimensional scene for training, and combines them into an image synthesis loss, using image similarity Degree is used as supervision to carry out unsupervised learning training on static and dynamic scenes in the image respectively, and at the same time, a new loss function improvement effect is proposed to solve the problem of discontinuous depth in space and time that often occurs in video depth map estimation. see figure 1 A method for estimating a video depth map with spatiotemporal consistency provided by an embodiment of the present invention includes the following steps:
[0020] Step 1. Create a tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More