

A Method for Relative Pose and Inertia Estimation of Completely Non-cooperative Targets in Space
A non-cooperative target and relative pose technology, applied in the field of relative pose and inertia estimation of completely non-cooperative targets in space, can solve the problems of only offline calculation, large amount of calculation, lack of measurement beacons, etc., to achieve reliable estimation results, The effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0124] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0125] The invention discloses a method for estimating the relative pose and inertia of a completely non-cooperative target in space. The method includes the following steps:
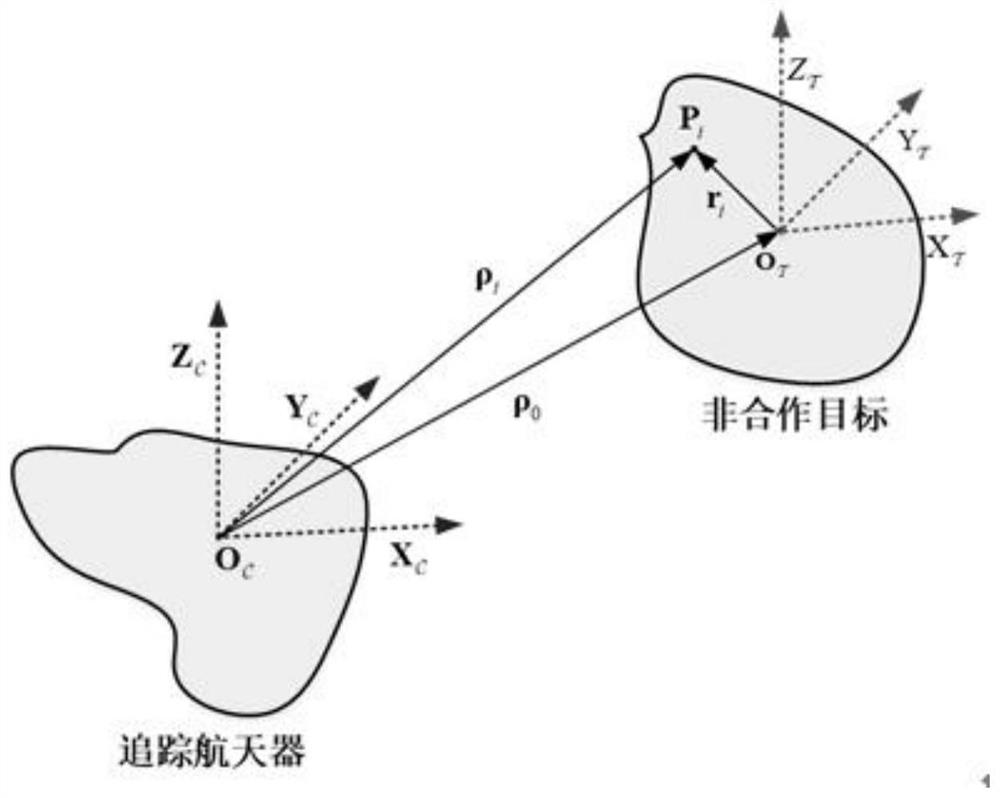
[0126] Step 1: Obtain the image information of the non-cooperative target in real time by two industrial cameras set on the tracking spacecraft at left and right intervals and with the same parameters, and obtain the image positions and image speeds of several feature points on the left and right cameras on the non-cooperative target through calculation , and then calculate the 3D position and velocity of each feature point in the camera coordinate system;
[0127]Step 2. According to the rigid body motion model, estimate the relative angular velocity of the non-cooperative target from the 3D positions and velocities of at least three feature points in step 1; combine ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More