Robot following path planning method and system with course constraint
A technology of following robots and path planning, applied in control/regulation systems, instruments, navigation, etc., can solve problems such as ignoring robot heading, positioning information, and environmental prior information, which is difficult to obtain accurately, and robot heading is prone to fluctuations, etc., to achieve improvement Stability, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
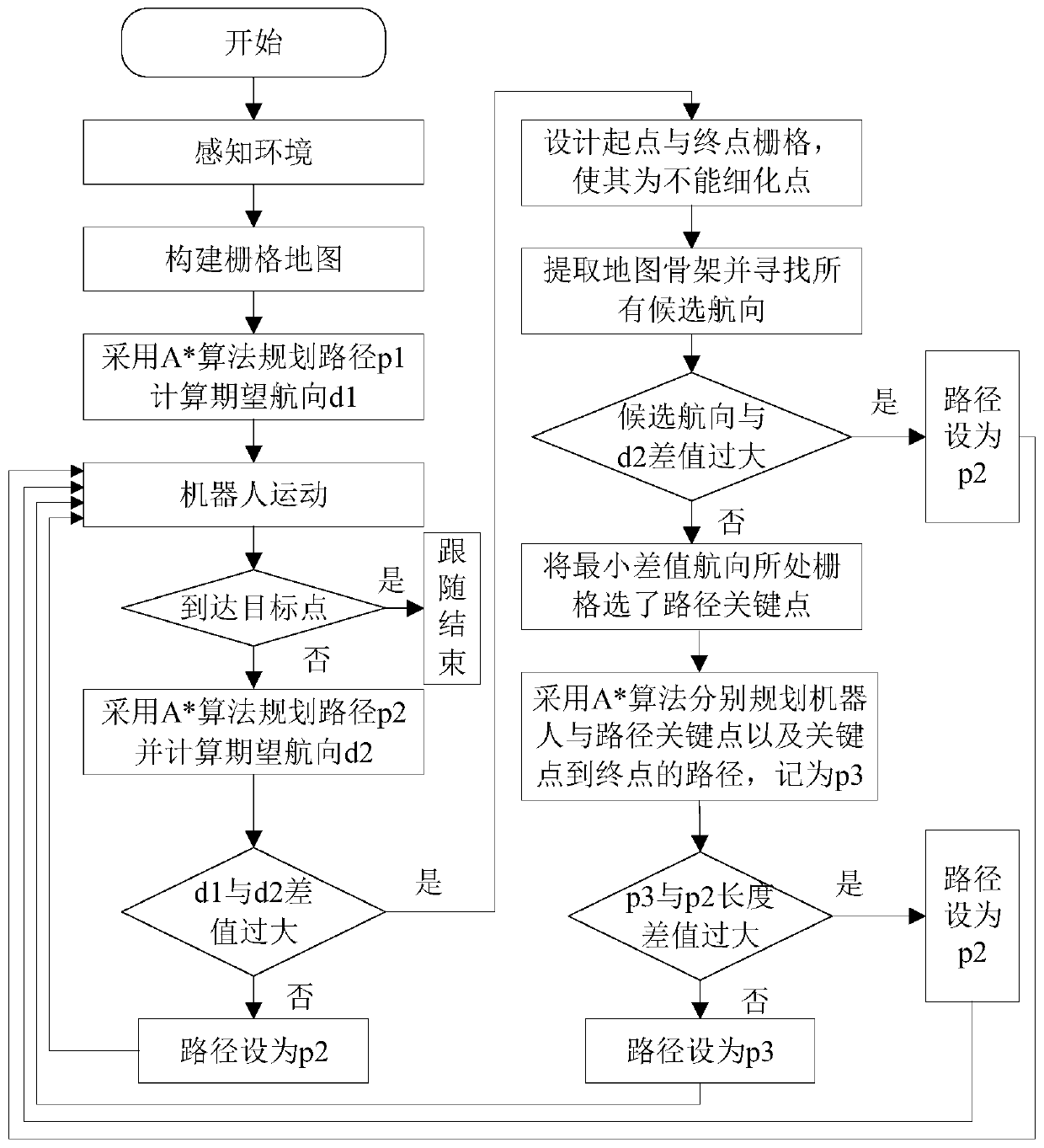
[0053] Such as figure 1 As shown, Embodiment 1 of the present disclosure provides a path planning method for a following robot with heading constraints. First, the initial path planning is performed through the A* algorithm, and then the shortest path p1 and the expected heading d1 of the robot at the current moment can be determined; in the subsequent path When re-planning, the A* algorithm is also used for path planning and the updated shortest path p2 and expected heading d2 of the robot are obtained.
[0054] If the difference between d2 and d1 is less than the threshold, it is considered that the updated path heading has little fluctuation compared with the previous moment, and the robot moves forward according to p2. Otherwise, it is considered that the updated path does not meet the robot heading stability requirements, and it needs to be further optimized.
[0055] The optimization method is as follows: firstly extract the traversable grid skeleton connecting the robo...
Embodiment 2
[0082] Embodiment 2 of the present disclosure provides a path planning system for a following robot with heading constraints, including:
[0083] The grid map construction module is configured to: construct an environmental grid map, place the robot in the middle of the lowest grid, and then project obstacles and target positions into the grid map according to the environmental information;
[0084] The path planning module is configured to: perform initial path planning through the A* algorithm, determine the first shortest path and the first expected heading of the robot at the current moment, and perform path re-planning through the A* algorithm during the movement of the target and the robot to obtain The updated robot's second shortest path and second expected heading;
[0085] The path selection module is configured to: if the difference between the second expected heading and the first expected heading is less than the first preset threshold, the robot walks along the s...
Embodiment 3
[0090] Embodiment 3 of the present disclosure provides a medium on which a program is stored. When the program is executed by a processor, the steps in the path planning method for a following robot with heading constraint as described in Embodiment 1 of the present disclosure are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More