

Autonomous danger avoidance method suitable for high-speed surface unmanned boat
An unmanned boat, dangerous technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve the requirements of high-speed unmanned boat obstacle avoidance course stability, obstacles instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] combine Figure 8 , the autonomous danger avoidance method applicable to the high-speed water surface unmanned boat of the present invention comprises the following steps,
[0025] Step 1: Obtain the current status of the unmanned boat, command information and surrounding obstacle information.
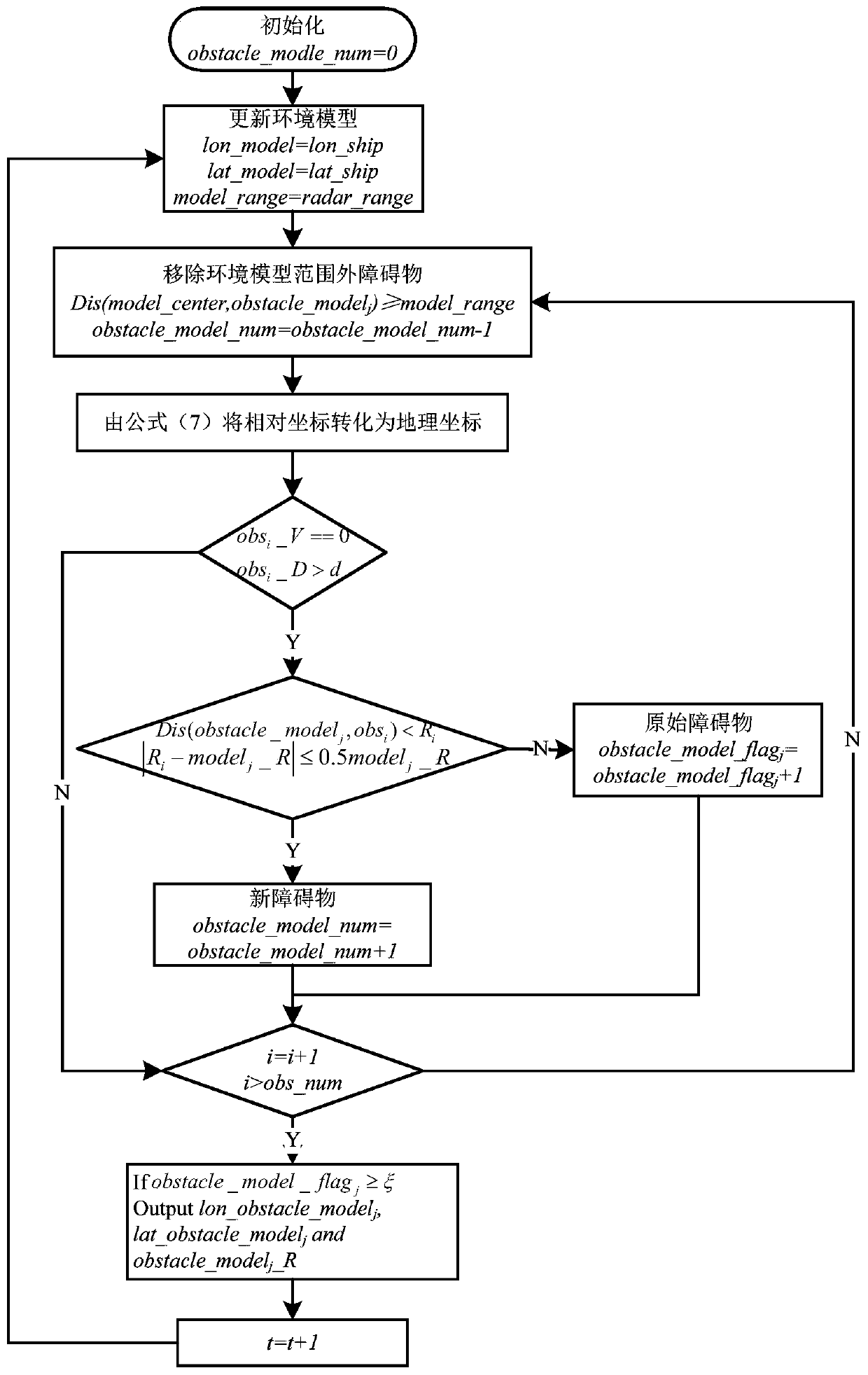
[0026] Step 2: Improve the stability of obstacles in the environment model through a high-confidence local environment modeling method.
[0027] Step 3: Output the stabilized obstacle information in the current environment model.
[0028] Step 4: Improve the heading stability during collision avoidance through a highly reliable heading stability maintenance method based on speed obstacles.
[0029] Step 5: Output new instruction information.
[0030] The basic principle of the high-confidence local environment modeling method described in step 2 is to fully consider the influence of the radar blind zone, update the obstacle position and size information in real time outside t...
Embodiment 2
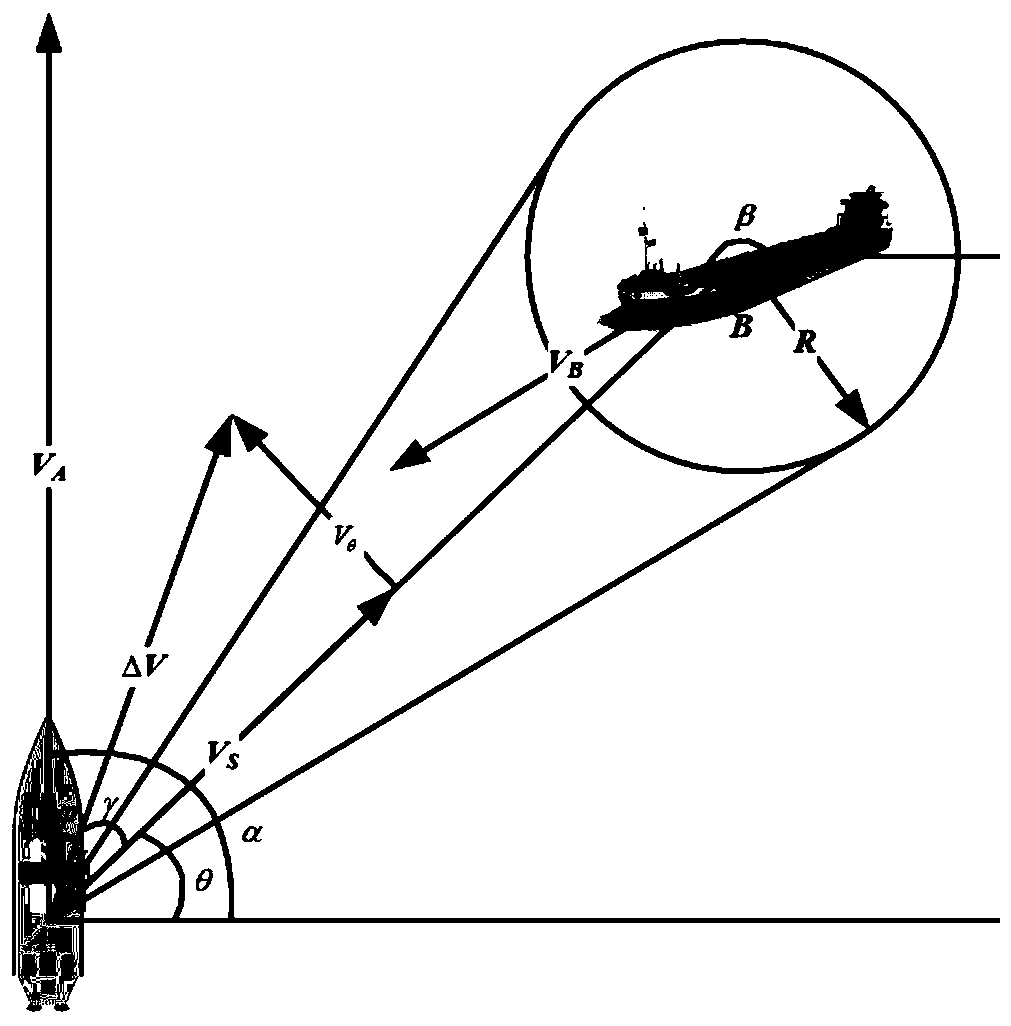
[0038] combine figure 1 In the process of autonomous navigation, the unmanned boat needs to make judgments on possible collisions and take corresponding avoidance measures. In the figure, A is the current position of the surface unmanned vehicle, with the speed V A , The boat advances at the heading angle α (in the ocean environment, the surface unmanned boat is simplified to a point). B is a circular obstacle with a radius R and a circle center at B, at a speed of V B , The bow angle β advances. ΔV is V A with V B The resultant velocity of is in the direction of The angle between the line and the line of sight AB is γ. Decompose △V into velocity V along the line of sight AB direction S and the velocity V perpendicular to the direction AB θ :
[0039]
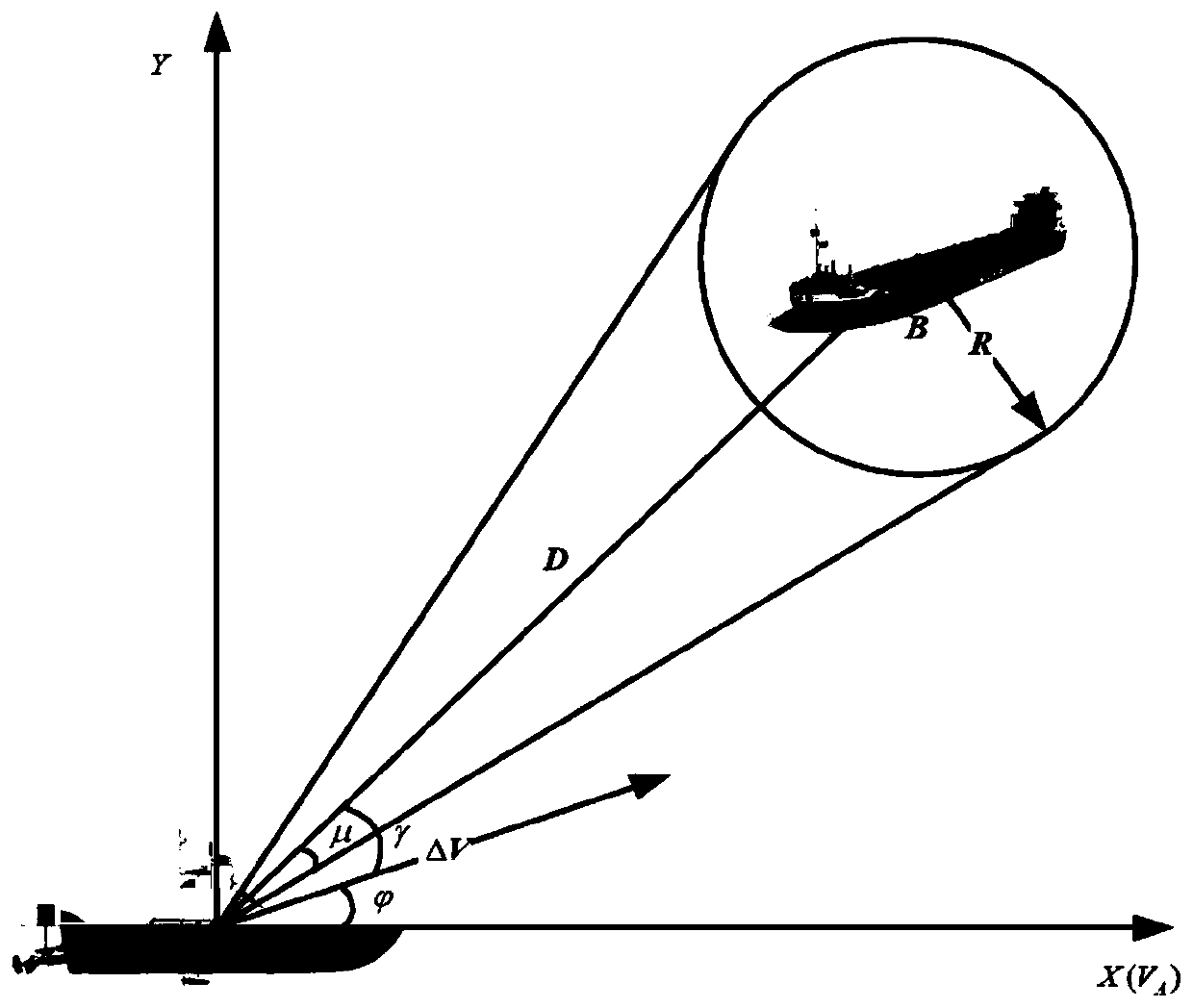
[0040] combine figure 2 , with the current position of the unmanned boat as the origin, the bow direction of the boat is the positive direction of the X-axis, and the port side is the positive direction of the Y-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More