

A Path Planning Method for Surface Unmanned Vessel Based on Fast Scanning Method
A fast scanning and path planning technology, applied in two-dimensional position/channel control, vehicle position/route/height control, instruments, etc., to achieve good smoothness, reduce route length, and improve computing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0036] Specific implementation mode one: combine Figure 1 to Figure 8l Illustrate this embodiment, a method for planning the path of an unmanned surface vehicle based on the fast scanning method described in this embodiment includes the following steps:
[0037] Step 1: Obtain the global map information, and construct the static global environmental potential field through the fast scanning method;
[0038] Step 2: Obtain the current state of the UAV and the information of surrounding obstacles, and according to the mission requirements of the UAV, construct a potential field with the mission end point as the source point through the fast scanning method;
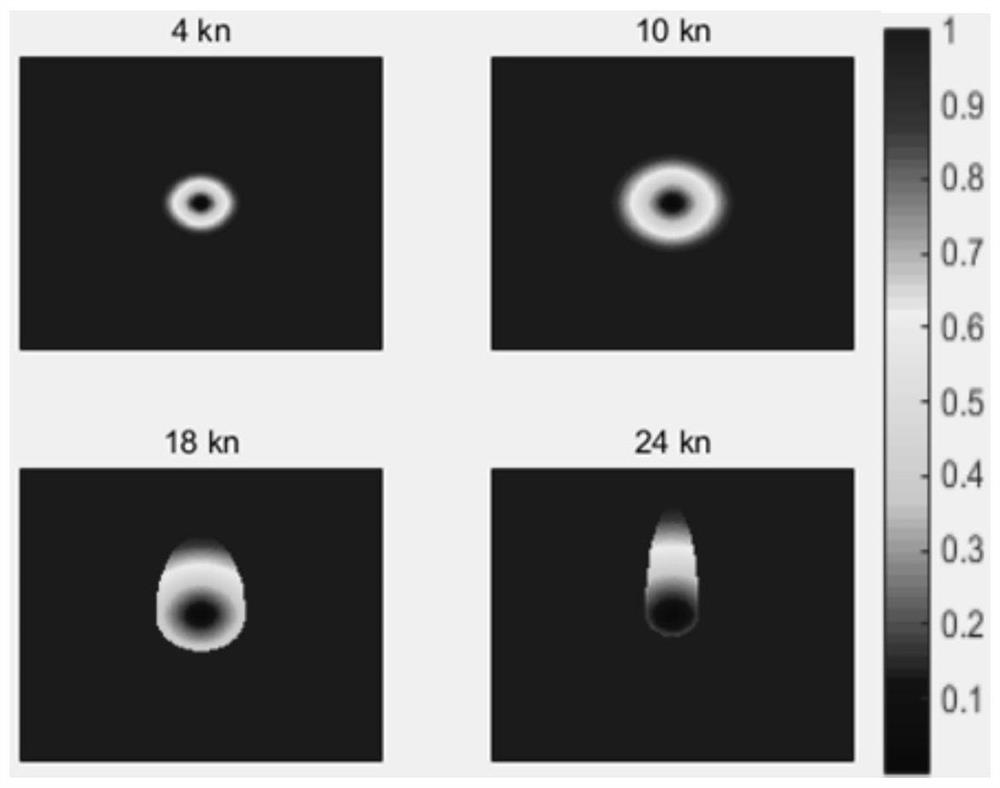
[0039] Step 3: Construct a dynamic obstacle model through the fast scanning method;
[0040] Step 4: Superimpose the potential field obtained in Step 2 and Step 3 to obtain the final planning potential field of the UAV;
[0041] Step 5: Use the gradient descent method to plan the navigation path of the unmanned vehicle i...
specific Embodiment approach 2
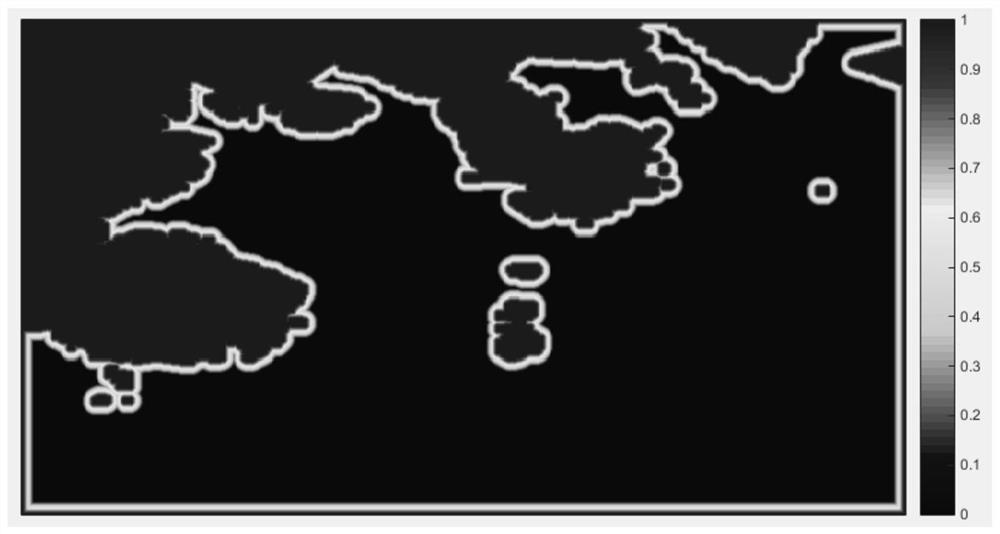
[0044] Specific implementation mode two: combination Figure 1 to Figure 8l Describe this embodiment. In step 1 of this embodiment, first transfer the task environment map to a grid map and process it into a binary map. 1 represents the static obstacle area, 0 represents the ocean area, and the coastline is extracted, that is, 0 , 1 The boundary is set as the scanning source point, and the FSM algorithm is used to scan the ocean area until the values of all nodes converge, that is |t new -t old |≤δ, δ is the minimum value at which the given control iteration stops, t new is the updated value of the node, t old is the value before the update of the node, the normalized potential field, and the static environment map is generated after threshold value processing. The static environment remains unchanged throughout the planning process, and the generated map matrix is recorded as M static and store. The undisclosed technical features in this embodiment are the same as tho...
specific Embodiment approach 3
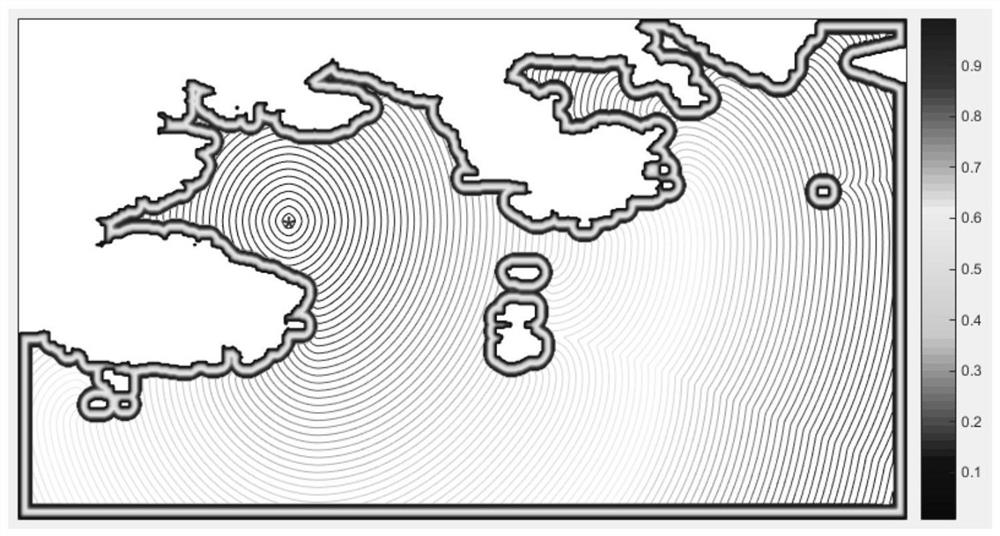
[0061] Specific implementation mode three: combination Figure 1 to Figure 8l Describe this implementation mode. In step 2 of this implementation mode, in M static Basically, the end point of the mission of the unmanned ship is set as the scanning source point, that is, the value of the end point is initialized to 0, and the static global situation field is obtained by using the fast scanning method, and the generated map matrix is denoted as M PF . The undisclosed technical features in this embodiment are the same as those in the second embodiment.
[0062] In this embodiment, combined with figure 2 to explain, to figure 1 Using the fast scan method again, in the static environment matrix M static Based on the task end point as the initial point of scanning, FSM is used to obtain the static global situation field, and the generated map matrix is denoted as M PF , is the final potential field used for static global path planning. Different from generating a static en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More