A safety anti-collision system in the working state of the manipulator
A technology of working state and mechanical arm, applied in the direction of manipulator, manufacturing tool, etc., can solve the problem of inability to effectively ensure the safe operation of equipment, and achieve the effect of good safety protection function and high sensing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0031] Attached below Figure 1-Figure 2 The present invention is described in detail, specifically, the structure is as follows:
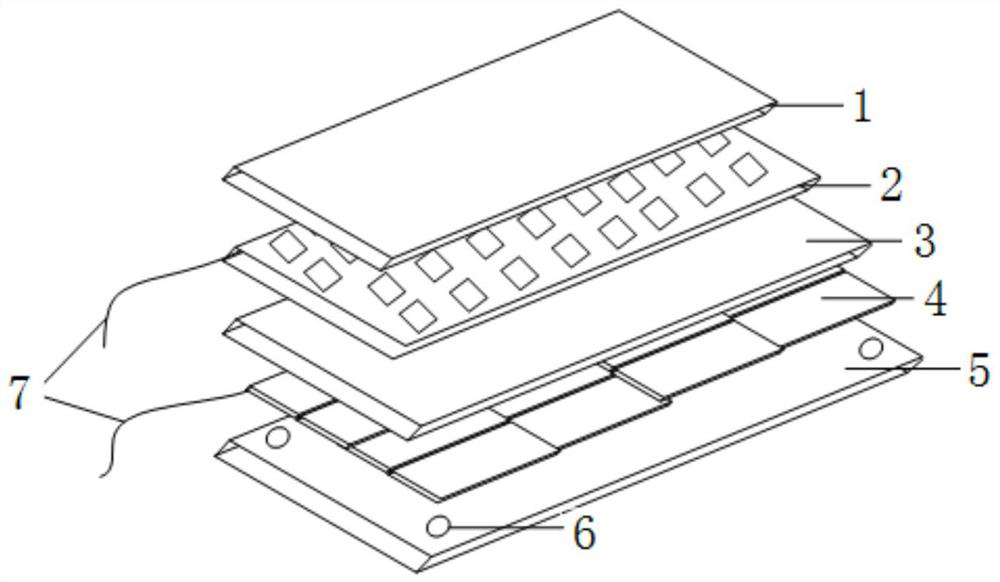
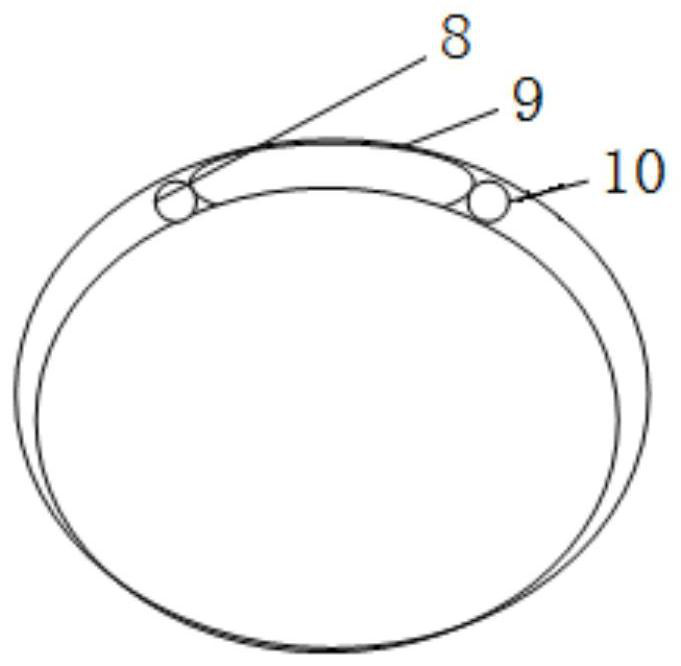
[0032] This embodiment provides a safety anti-collision system under the operating state of the manipulator, which is mainly used for safety protection under the operating state of the large-scale heavy-duty multi-degree-of-freedom manipulator, including the first anti-collision system and the second anti-collision system, the first The anti-collision system is a multi-layer protective layer laid on the surface of the robot arm, and the second anti-collision system is a safety protection bracelet worn by construction workers. In this embodiment, the protection layer is configured as a rectangle.
[0033] The first anti-collision system includes a rigid protective layer 5, a piezoelectric vibration induction layer 4, a first flexible protective layer 3, an electrostatic induction layer 2 and a second flexible protective layer 1 laid out from the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More