

Unmanned aerial vehicle visual angle vehicle identification tracking method based on reinforcement learning
A technology of reinforcement learning and vehicle recognition, applied in neural learning methods, character and pattern recognition, computer components, etc., can solve problems that affect the appearance of tracking objects, low resolution and small scale of UAV viewing angle targets, and achieve Fast, efficient and accurate automatic analysis and monitoring applications, accurate and efficient tracking of results, and the effect of liberating labor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
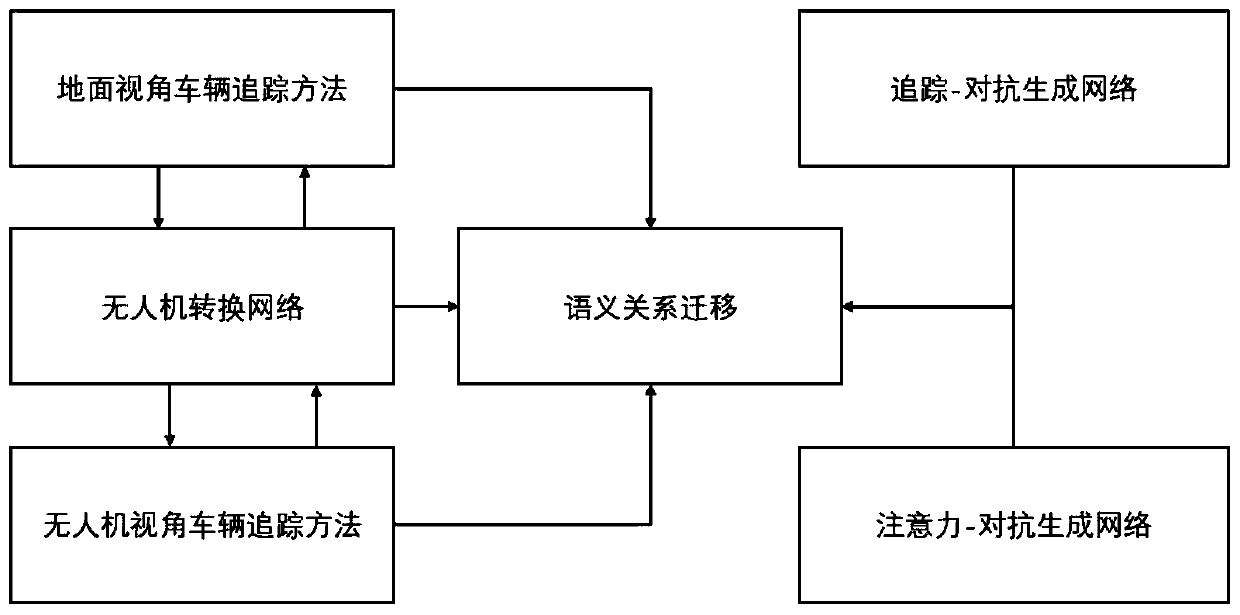
[0030] Focusing on the typical demonstration application requirements of automatic tracking of vehicles from the perspective of drones in the fields of transportation and city construction, the key technology and application system research and development based on reinforcement learning from the perspective of drones proposed by this invention establishes a high-speed track that can support unsupervised The automatic identification and tracking of vehicles can effectively break through the bottleneck problems of high technical threshold, complicated use, and long product generation time in the fields of intelligent transportation and automatic driving, etc.
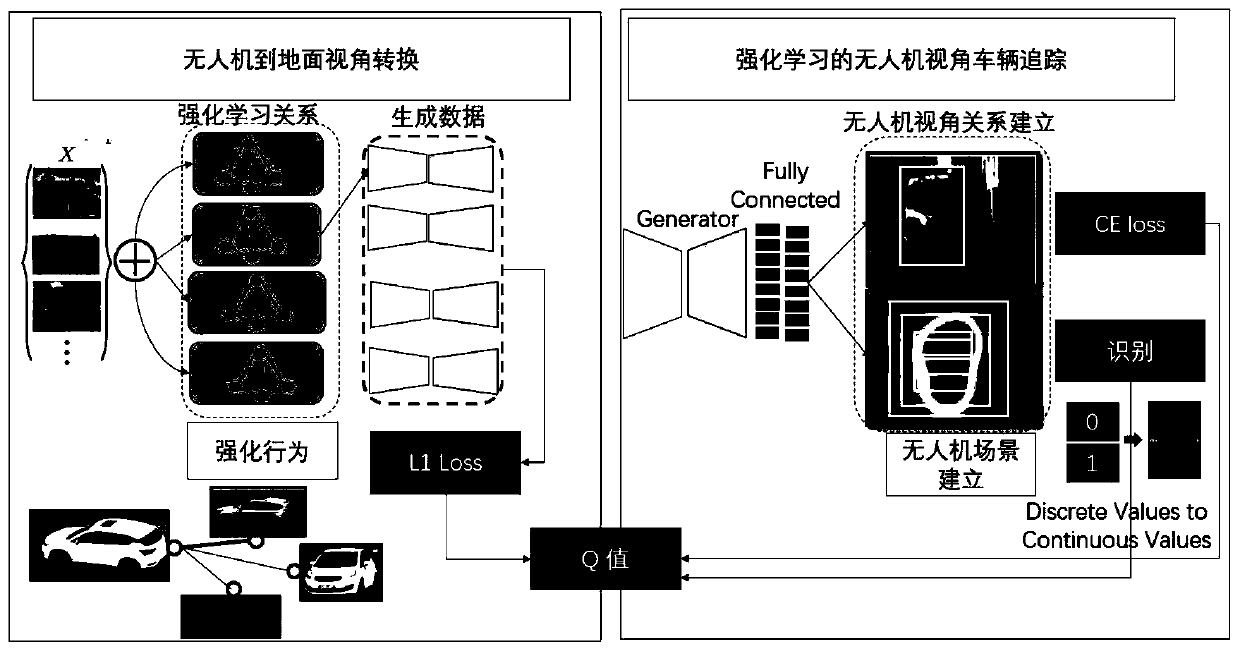
[0031] Aiming at the lack of datasets for deep learning networks, an automatic generation method of UAV datasets based on reinforcement learning is proposed. Cooperate with the vehicle perspective of the unmanned driving dataset and the unlabeled video collected by the drone to convert the perspective to adapt to the netw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More