

Intelligent screwing and assembling system based on crawler type six-axis robots
A six-axis robot and assembly system technology, applied in the direction of manipulator, metal processing, metal processing equipment, etc., can solve the problems of increasing workload, high dependence on operators, reducing the number of workpieces placed, etc., to improve work efficiency, improve Work efficiency, the effect of saving work steps and time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to further illustrate the technical means and effects adopted by the present invention, the following describes in detail in conjunction with preferred embodiments of the present invention and accompanying drawings.
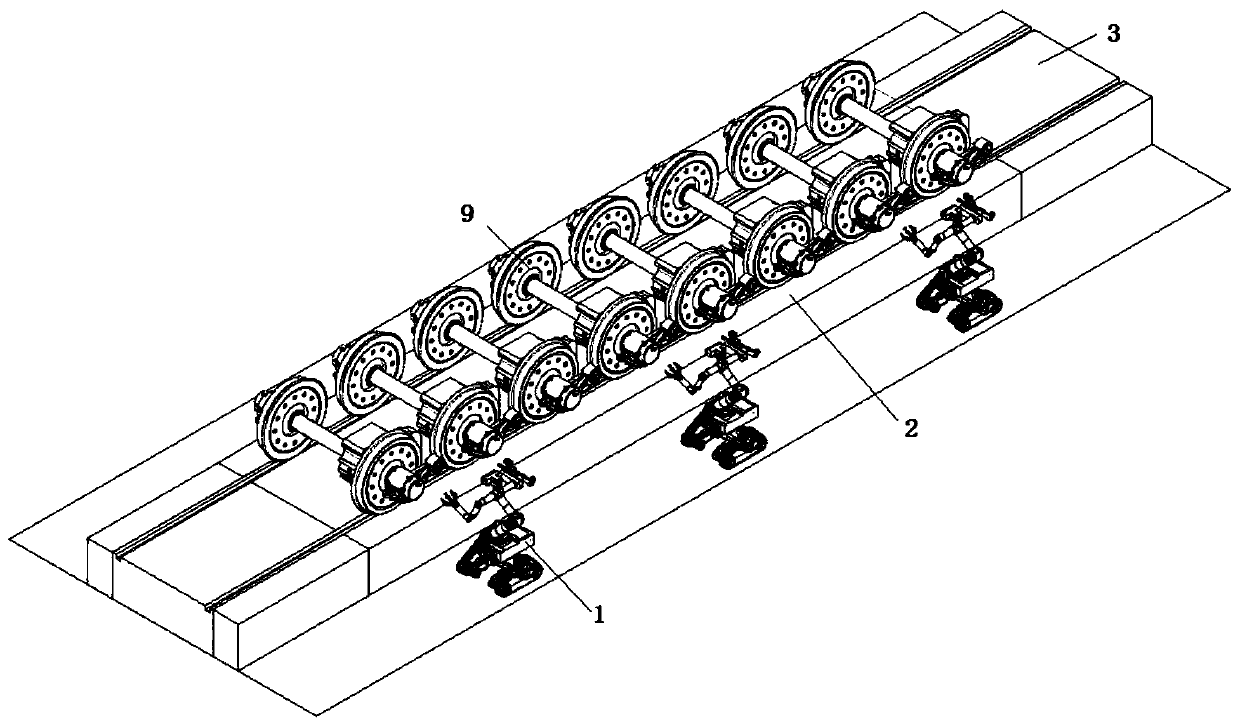
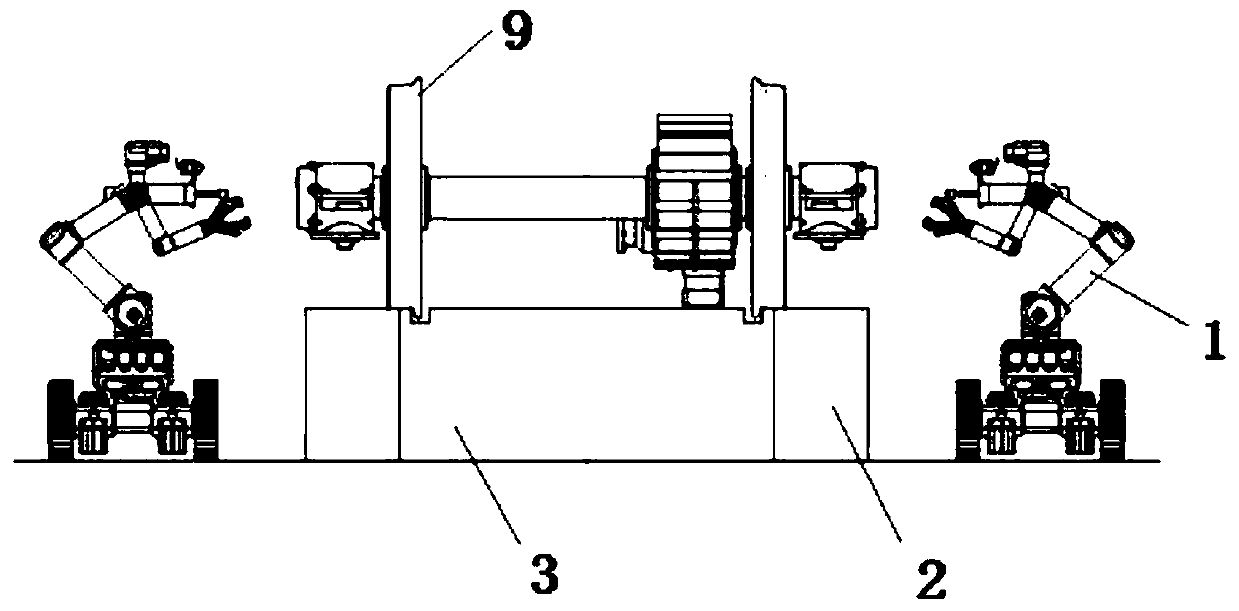
[0030] see Figure 1 to Figure 3 , an intelligent tightening assembly system based on a crawler-type six-axis robot 1 includes: a robot 1, a transport line, and an identification system 4; the transport line includes: a small parts transport line 2 and a wheel set workpiece transport line 3. A small parts conveying line 2 is arranged on both sides of the workpiece conveying line 3, and a robot 1 is arranged on one side of the small parts conveying line 2, and an identification system 4 is arranged on the robot 1.
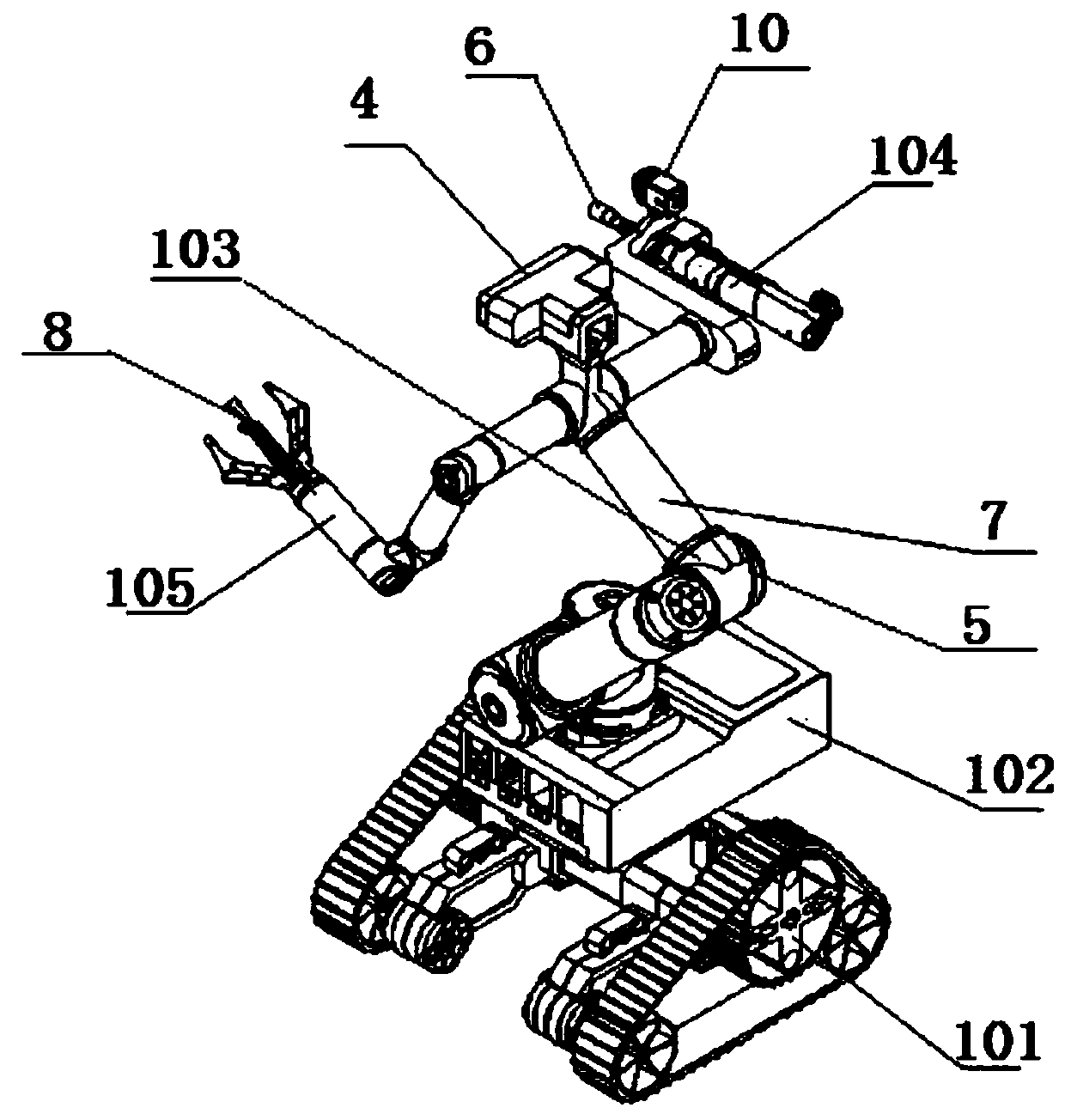
[0031]Further, the robot 1 is a crawler-type six-axis robot 1, and the robot 1 includes: a crawler drive module 101, a central control and energy supply module 102, a robot body 103, a tightening shaft 104, and a manipulator 105; the up...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More