

A detachable multifunctional rehabilitation robot
A rehabilitation robot and multi-functional technology, applied in the field of robotics, can solve problems such as the narrow range of movement of the robotic arm of the fetching robot, the inability to assist the elderly in standing and walking, and the inability to help the elderly in body movements, etc., to achieve clear design principles and easy operation Ease of understanding and reduced waste
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
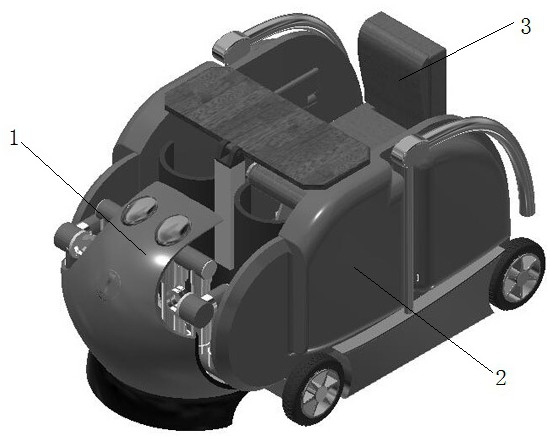
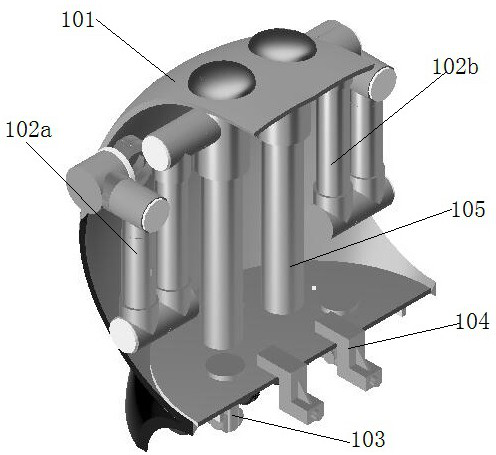
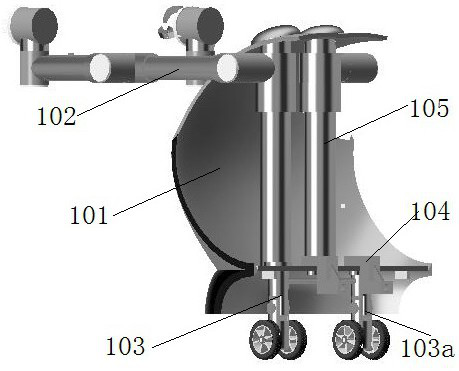
[0039] like Figure 2-3 As shown, when the front body mobile robot 1 receives the command from the host computer, the connecting block 104 made of electromagnet material is automatically disconnected from the multi-function body 2, and the rocker arm 103a of the triangular landing gear wheel structure 103 falls down, and its The wheels on the upper part are in contact with the ground; the four-claw six-degree-of-freedom mechanical arm 102a and the three-claw six-degree-of-freedom mechanical arm 102b are deployed at the same time, and the deployment process of a single mechanical arm is as follows Figure 4 As shown in the figure, the connecting ring 1021 remains stationary to enhance the stability of the deformation process of the mechanical arm. Joint 2 1023 drives arm 2 1028 to rotate 180 degrees with joint 1 1022 as the reference system and away from joint 1 1022, joint 3 1024 rotates 180 degrees with joint 2 1023 as the coordinate system, and joint 4 1025 can be adjusted a...
Embodiment 2
[0043] like Figure 8 , Figure 9 and Figure 10 As shown in the figure, when the seat 3 in the sitting state receives an instruction to change to the reclining state, the seat back 301 can be rotated around the axis to be horizontal under the drive of the motor, and the auxiliary support device 304 can rotate counterclockwise around the axis as a whole. At the same time, the two rods of the support bar 3041 are in an unfolded state to support the baffle plate 3042 under the seat back 301, which strengthens the integrity of the seat 302 and the seat back 301, thereby improving the stability when lying flat; at the same time, The chair legs 303 are moved back about 30cm in the chute of the body bottom plate 204 , and the flat laying auxiliary plate 208 is extended on the inner side and side of the multifunctional car body 2 to make it horizontal, which widens the laying area and improves the user's comfort.
Embodiment 3
[0045] like Figure 7 , Figure 9 and Figure 10 As shown, when the adjustable seat 3 in the sitting state receives an instruction to assist standing, the support plate 206 on the inner side of the multi-purpose vehicle body 2 is retracted, the seat 302 slowly rotates around the front end axis, and the seat 302 lifts the user , the seat back 301 is gradually kept vertical to the ground, and when the entire seat is transformed to be vertical to the ground, the seat transformation is completed, and the chair legs 303 are moved backward in the chute 4 of the underbody 204 by about 30 cm (set according to actual use, Subject to the user having enough space for movement, not limited to this specific value), the human body remains in a standing state.
[0046] In the standing state, the user can remotely switch on and off the conveyor belt 205 and control its speed to perform body movements such as jogging or jogging. At this time, the small table board 201 can be rotated 90° arou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More