

Stable control method and system for offshore crane provided with double-pendulum characteristics
A stability control method and crane technology, applied in the directions of cranes, load hanging elements, transportation and packaging, etc., can solve the problems of not considering the heave motion of the ship, not considering the saturation of the actuator, and not being able to directly apply the double pendulum offshore crane.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] In one or more embodiments, a method for stability control of an offshore crane with double pendulum characteristics is disclosed, including the following processes:
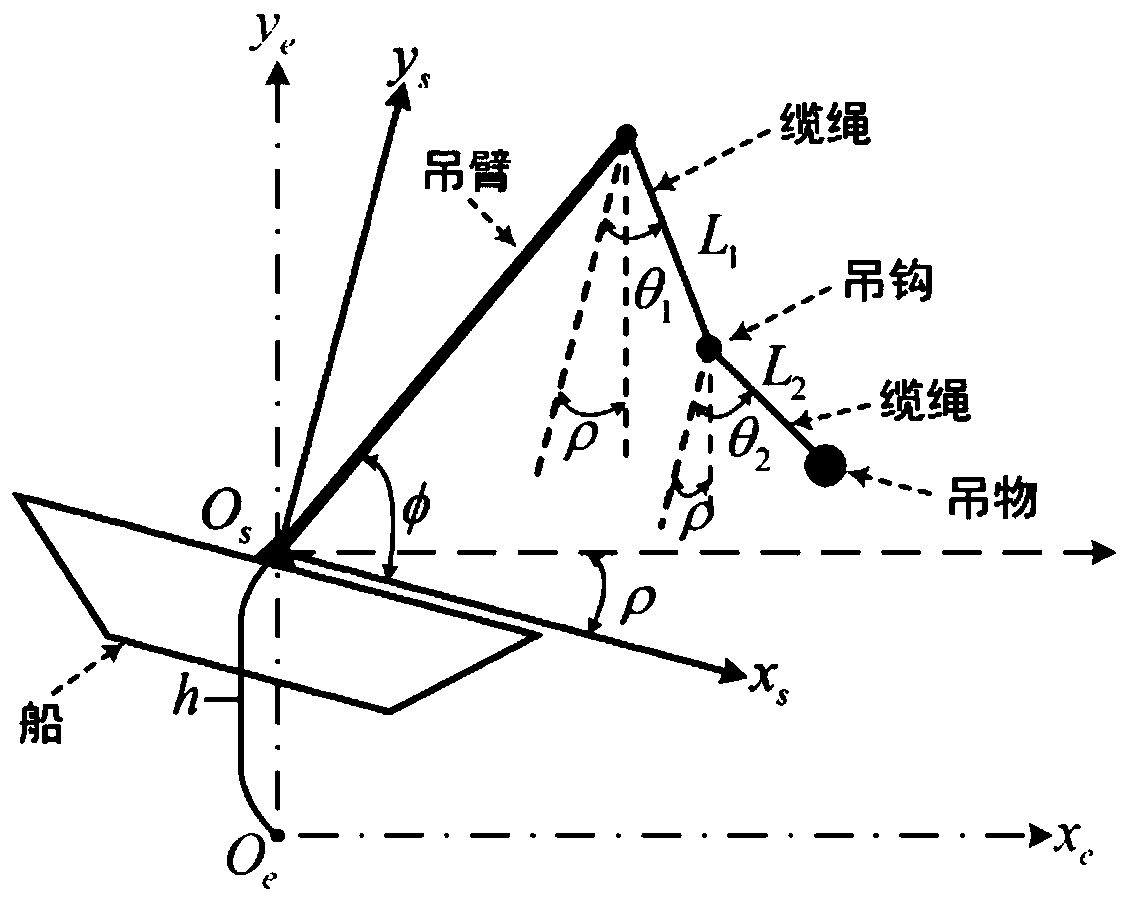
[0046] (1) In the presence of disturbances caused by hull roll and heave motion, the dynamic model of the double-pendulum offshore crane is established with the control goal of stabilizing the hook and the hanging object at a specific position in the geodetic coordinate system ;
[0047] (2) Introduce the elevation angle of the boom in the geodetic coordinate system, the length of the cable between the center of gravity of the hook and the top of the boom, the swing angle of the hook, and the swing angle state variables of the hanging object, and convert the dynamic model into a new dynamic model;
[0048] (3) Define the mechanical energy of the double pendulum offshore crane, and obtain a nonlinear controller with bounded control signals according to the derivative of the mechanical energy and a new dyn...
Embodiment 2
[0190] In one or more embodiments, an offshore crane stability control system with double pendulum characteristics is disclosed, comprising:
[0191] It is a device used to establish a dynamic model of a double-pendulum offshore crane by stabilizing the hook and the hanging object at a specific position in the geodetic coordinate system in the presence of disturbances caused by hull roll and heave motion ;
[0192] A device for introducing the elevation angle of the boom, the length of the cable between the center of gravity of the hook and the top of the boom, the swing angle of the hook and the swing angle of the hanging object, and converting the dynamic model into a new dynamic model ;
[0193] A device for defining the mechanical energy of a double-pendulum offshore crane, and obtaining a nonlinear controller with a bounded control signal according to the derivative of the mechanical energy and a new dynamic model;
[0194] Means for achieving stable control of an offsh...
Embodiment 3
[0197] In one or more embodiments, a terminal device is disclosed, which includes a processor and a computer-readable storage medium, the processor is used to implement instructions; the computer-readable storage medium is used to store multiple instructions, and the instructions are suitable for The method is based on loading and executing the above-mentioned offshore crane stability control method with double pendulum characteristics by the processor.
[0198] In some other embodiments, a computer-readable storage medium is disclosed, in which a plurality of instructions are stored, and the instructions are suitable for being loaded by a processor of a terminal device and executing the above-mentioned method for controlling stability of an offshore crane with double pendulum characteristics .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More