

Automatic parallel parking path planning method based on two sections of second-order Bezier curves
A technology of parallel parking and path planning, applied in the direction of control devices, etc., can solve problems such as difficult to find control points, sudden changes in curvature, and inflexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. It should be pointed out that the technical solution and design principles of the present invention will be described in detail below only with an optimized technical solution, but the protection scope of the present invention does not limited to this.
[0065] The described embodiment is a preferred implementation of the present invention, but the present invention is not limited to the above-mentioned implementation, without departing from the essence of the present invention, any obvious improvement, replacement or modification that those skilled in the art can make Modifications all belong to the protection scope of the present invention.
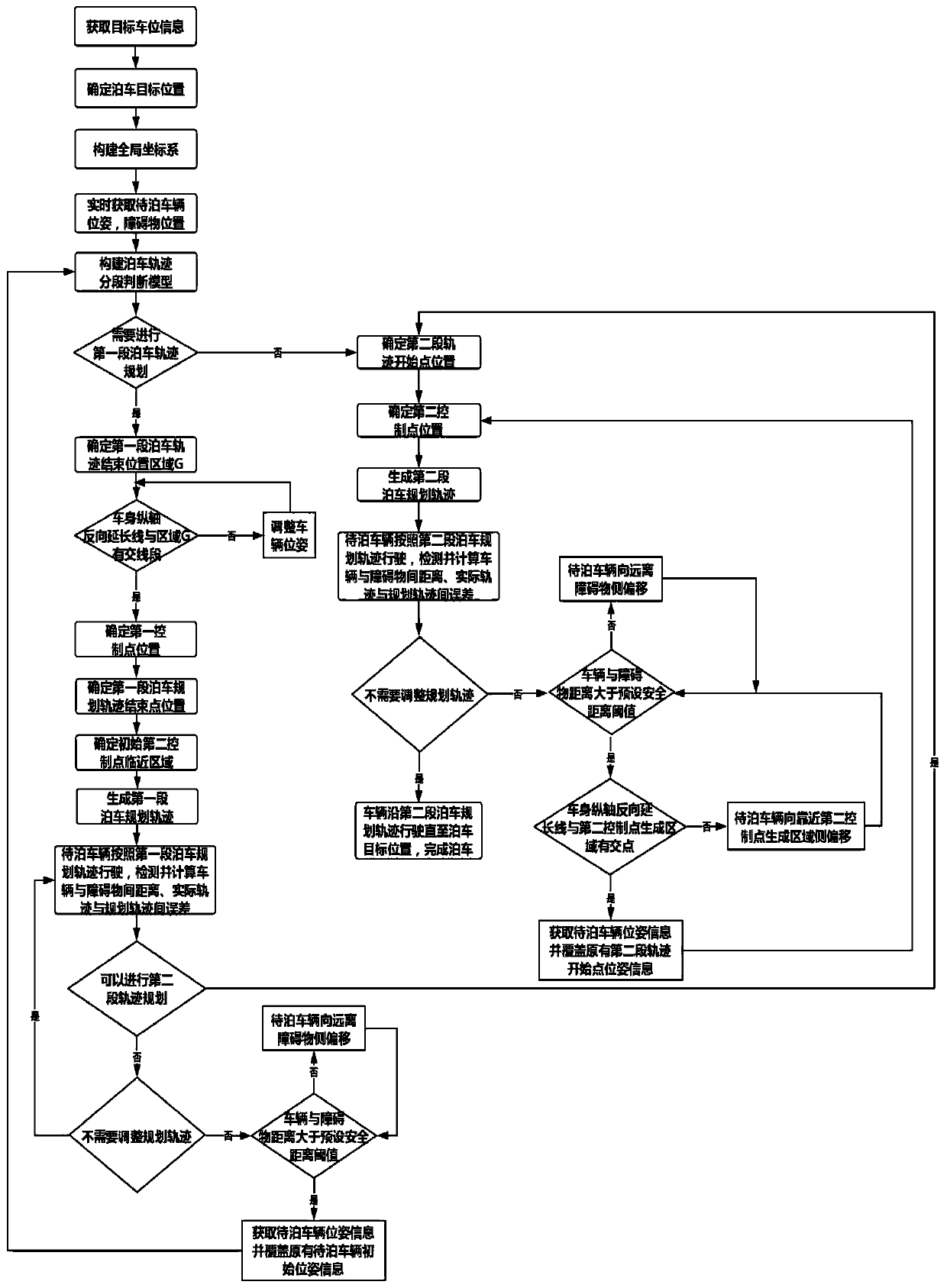
[0066] A flow chart of an automatic parallel parking path planning method based on two second-order Bezier curves is shown in figure 1 shown, including the following steps:
[0067] 1) Obtain the target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More