Unmanned aerial vehicle flight path recognition and acquisition method
A technology of flight path and acquisition method, which is applied in image data processing, instruments, calculations, etc., can solve the problems of inaccurate recognition and acquisition of UAV flight paths, and achieve the effect of improving the accuracy of recognition and acquisition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
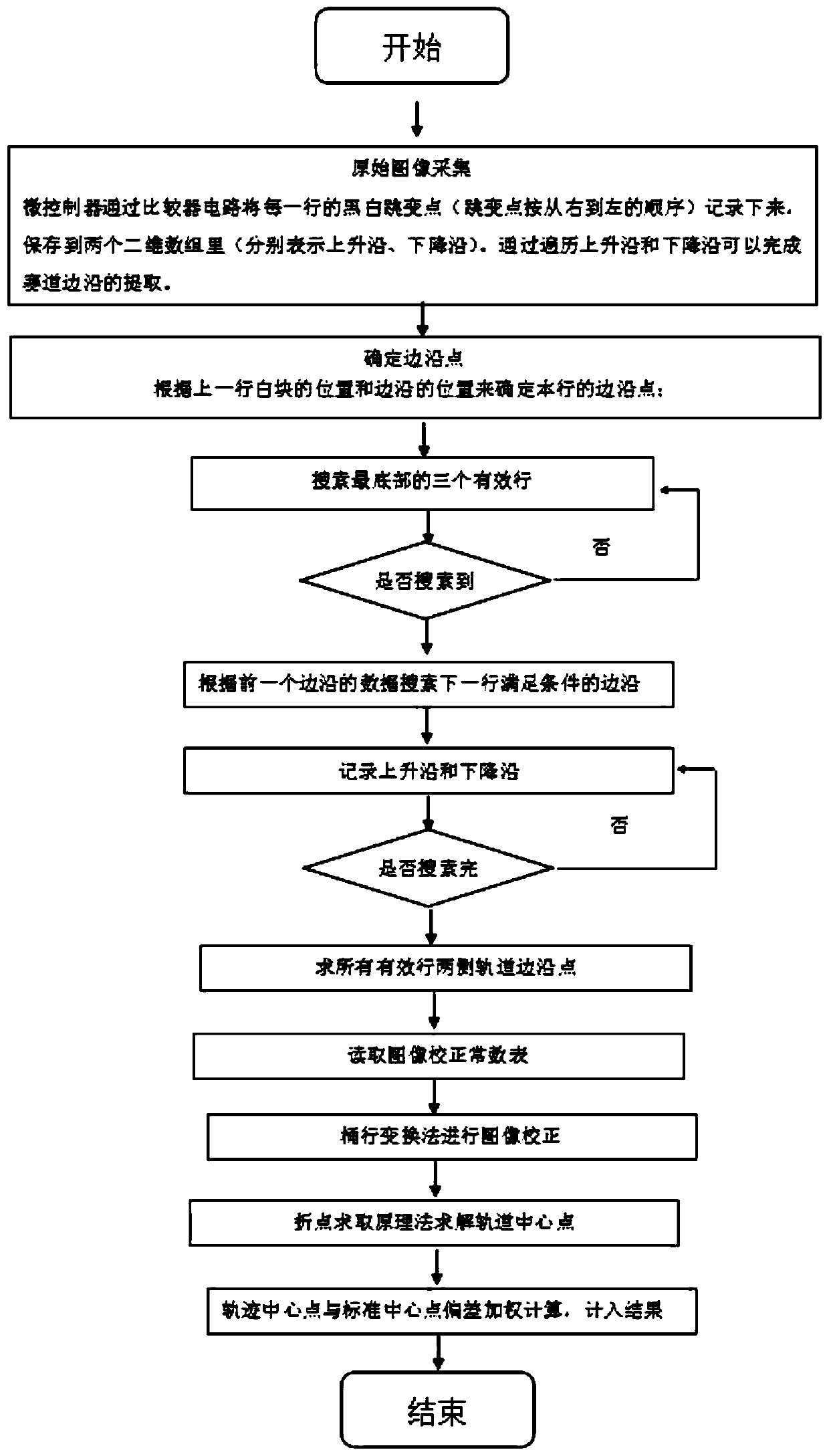
[0045] This embodiment provides a method for identifying and acquiring the flight path of an unmanned aerial vehicle, such as figure 1 As shown, the method includes the following steps:
[0046] S1: Collect the original images on the flight path of the UAV through the camera module,
[0047] S2: Determine path edge points:
[0048] S3: By searching the three valid rows at the bottom, it is judged that the search is completed, and then proceed to S4;
[0049] S4: According to the data of the previous edge, search for the edge that satisfies the condition in the next line; and record the rising edge and falling edge;
[0050] S5: Determine whether all the edges have been searched; if not, return to S4, and then proceed to S6;
[0051] S6: Find the track edge points on both sides of all valid lines;
[0052] To find the track edge points on both sides of all valid lines is to integrate all the edge points into an array set, for example, the edge point positions of the first l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com