

An Impedance Control Method of Robot Arm
An impedance control and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low impedance control accuracy, slow response, and inability to solve the impedance control problem of manipulators, so as to improve impedance control. performance, improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
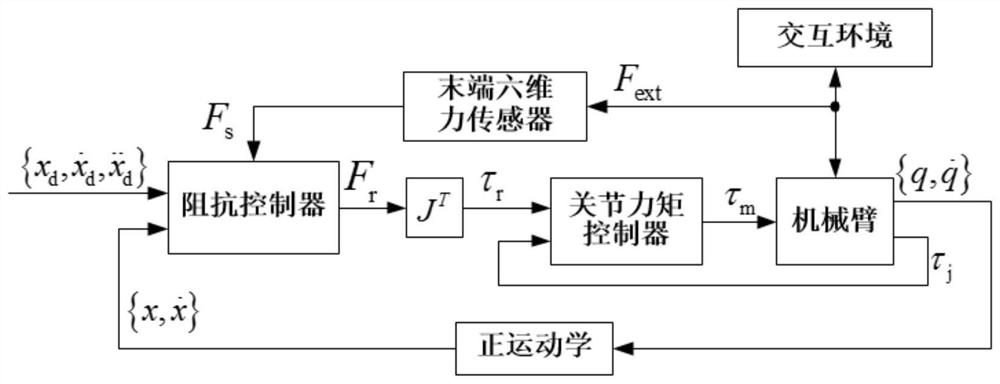
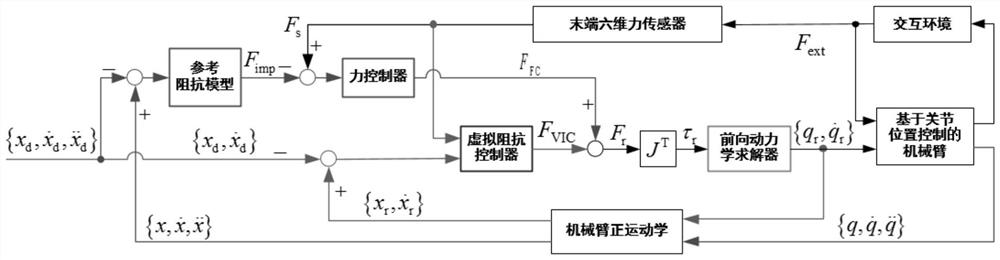
[0067] The block diagram of the impedance control system of the manipulator is as follows: image 3 shown.
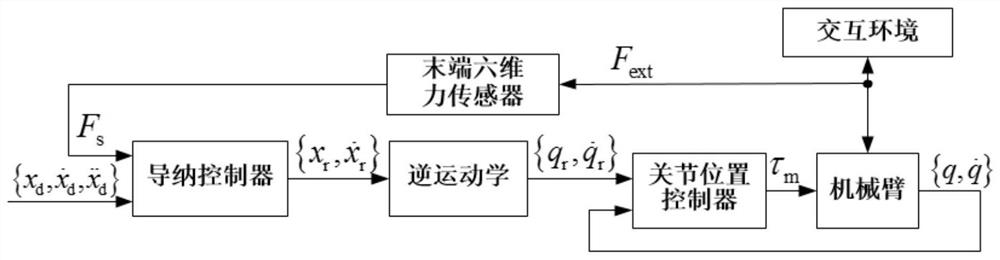
[0068] The manipulator impedance control system will figure 1 The force-based impedance control system shown with figure 2 The shown position-based impedance control system is fused; the joint position controller is built into the robotic arm; the figure 2 The admittance controller combined with the control architecture of the inverse kinematics of the manipulator is equivalently transformed into a virtual impedance controller combined with a forward dynamics solver; on the basis of the virtual impedance controller, the control loop is connected in parallel, and the function of the control loop is equivalent to At figure 1 The impedance controller in , makes the pose error by Cartesian space The reference impedance F obtained by the reference impedance model imp Converge to the actual measured external force F s , and then output F through the closed-loop force...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More