

Heuristic RRT mechanical arm motion planning method based on target deviation optimization
A motion planning and heuristic technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as time-consuming, feasibility cannot be guaranteed, local minimum, etc., to reduce the search path length, improve quality and efficiency, reduce The effect of the number of inflection points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The invention will be described in detail below in conjunction with specific embodiments.
[0060] first part
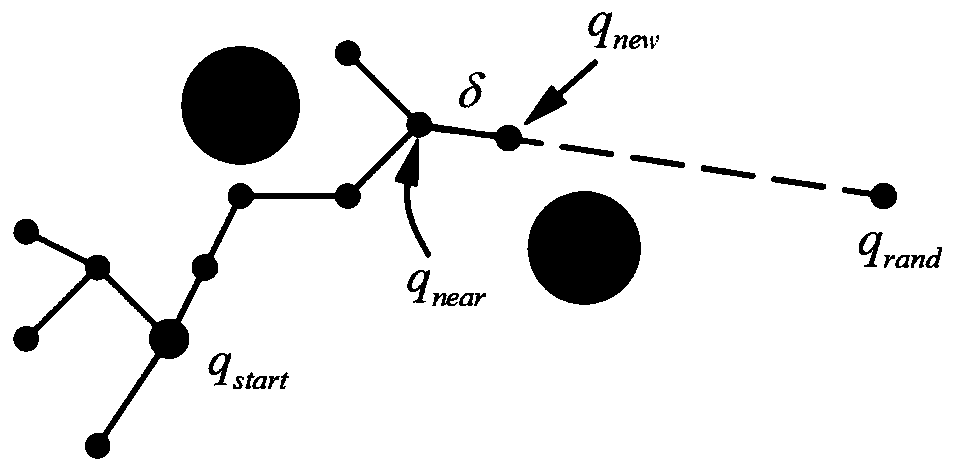
[0061] A heuristic RRT manipulator motion planning method (PBG-RRT) based on target-biased optimization of the present invention, the RRT algorithm is a fast path planning algorithm based on random sampling, which can effectively search high-dimensional spaces, and can effectively It is widely used to avoid the difficulty of 3D modeling. RRT is an algorithm that traverses the whole graph through probability and is easy to search in high-dimensional space. figure 1 is the growth process diagram of RRT.
[0062] The basic principle is: given a starting point q start , put q start store to q nodes In the space, the random sampling point q of the whole map in the space rand , looking for q nodes reach q rand The nearest point in is q near , at q near to q rand advance to q with a certain step size δ in the direction of new , during which collision detec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More