

A stage deformation actuator based on 4D printing
An execution device and stage technology, applied in the field of deformation execution devices, can solve the problems of low adaptability, low precision, complex method, etc., and achieve the effects of strong adaptability, simple manufacturing method, and adaptability to softness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described herein are merely intended to illustrate the invention and are not intended to limit the invention. Further, the technical features according to each of the various embodiments described below can be combined with each other as long as they do not constitute a collision between each other.
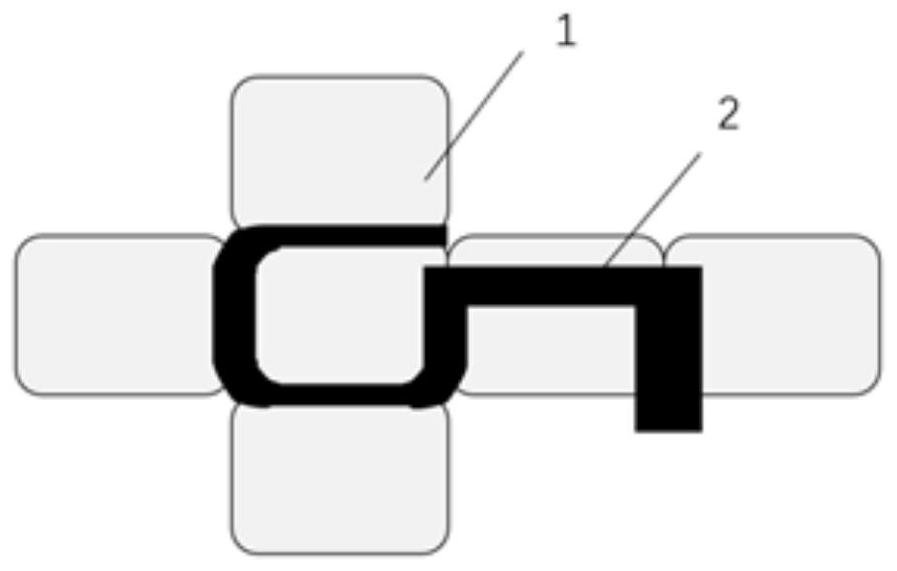
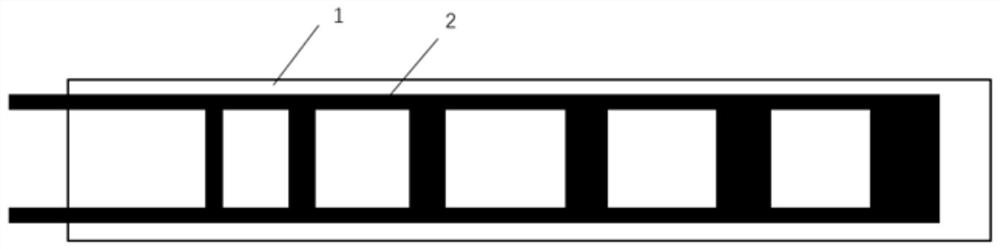
[0031]Such asfigure 1 withfigure 2 As shown, the present invention is based on 4D-printed stage deformation execution device, including a deformation execution body, and a controller, wherein
[0032]The deformation acting body includes an insulating layer and a plurality of conductive lines, the insulating layer being covered with a plurality of such conductive lines, and the insulating layer and a plurality of conducti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More