

Delta robot control method based on fuzzy set theory
A control method and robot technology, applied in the direction of program control manipulators, manipulators, and manufacturing tools, etc., can solve the problems of lack of systematic control, high experience requirements, and inability to accurately obtain system uncertainty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] The present invention is described in further detail below in conjunction with accompanying drawing:
[0119] In order to more clearly illustrate the technical solutions in the embodiments of the present invention or the prior art, the following will briefly introduce the drawings that need to be used in the description of the embodiments or the prior art. Obviously, the accompanying drawings in the following description are only are some preferred embodiments of the present invention, and the present invention is not limited to these embodiments.
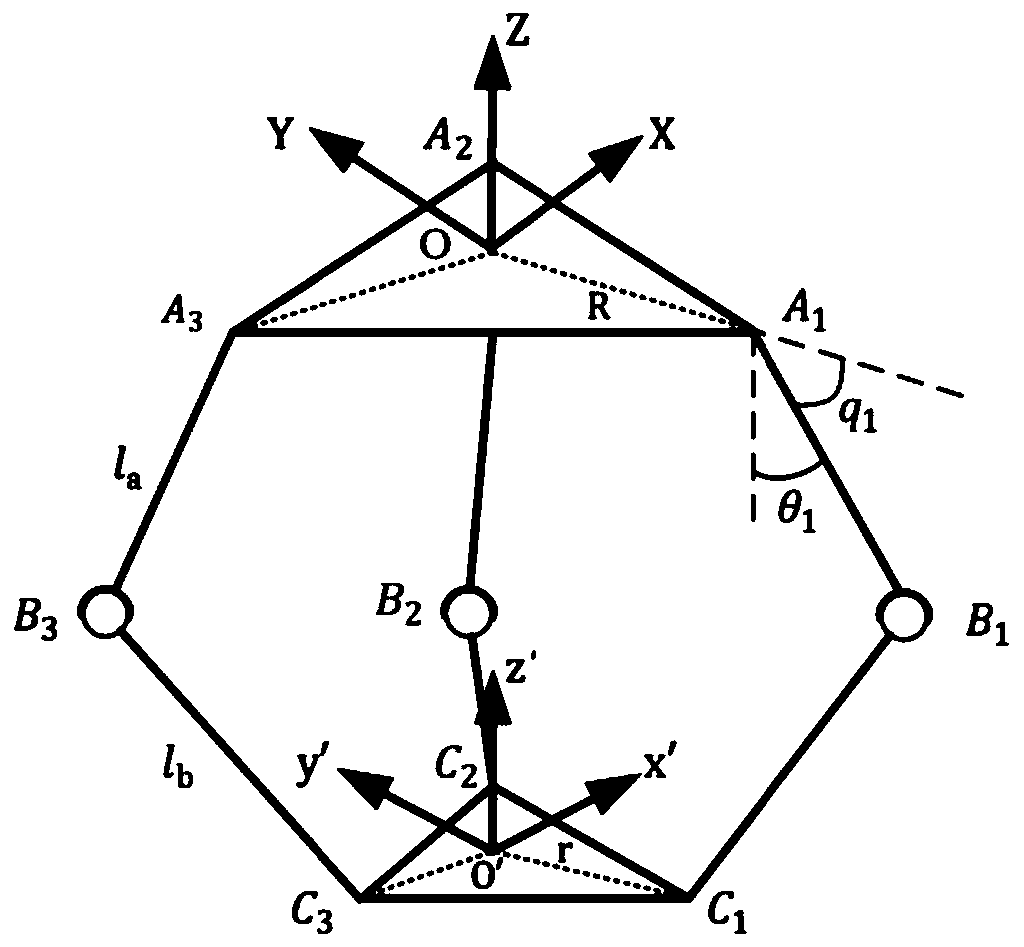
[0120] figure 1 Shown is a schematic diagram of the structure of the Delta robot in the working plane and the Cartesian coordinate system established in the working space.
[0121] Among them, O-A 1 A 2 A 3 is a static platform, O′-C 1 C 2 C 3 It is a dynamic platform, and both the static platform and the dynamic platform are equilateral triangles. O-XYZ is the static platform system (base coordinate system), O'-x'y...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More