

ArUco-label-based unmanned aerial vehicle visual guidance landing method
A vision-guided and unmanned aerial vehicle technology, which is applied in the direction of target-seeking control, image data processing, and instruments, can solve the problems of limited application scenarios, large environmental factors, and poor signal strength, so as to avoid installation and The effect of cost, rich coding, and accurate attitude calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
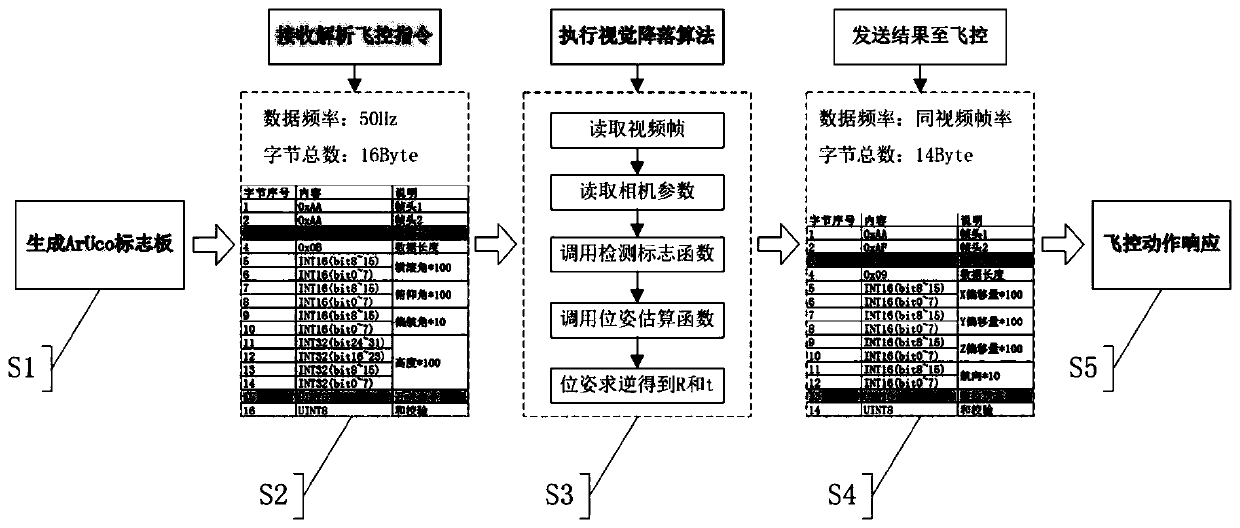
[0053] The invention provides a UAV vision-guided landing method based on ArUco tags. The whole process consists of five main parts: generating the ArUco logo board, receiving and analyzing flight control instructions, executing the visual landing algorithm, sending the result to the flight control, and responding to the flight control action, and the main body of the algorithm is on the onboard ARM board NVIDIA Jetson Nano completed. The flow chart of the method is as follows figure 1 shown.
[0054] The concrete implementation steps of described method are as follows:
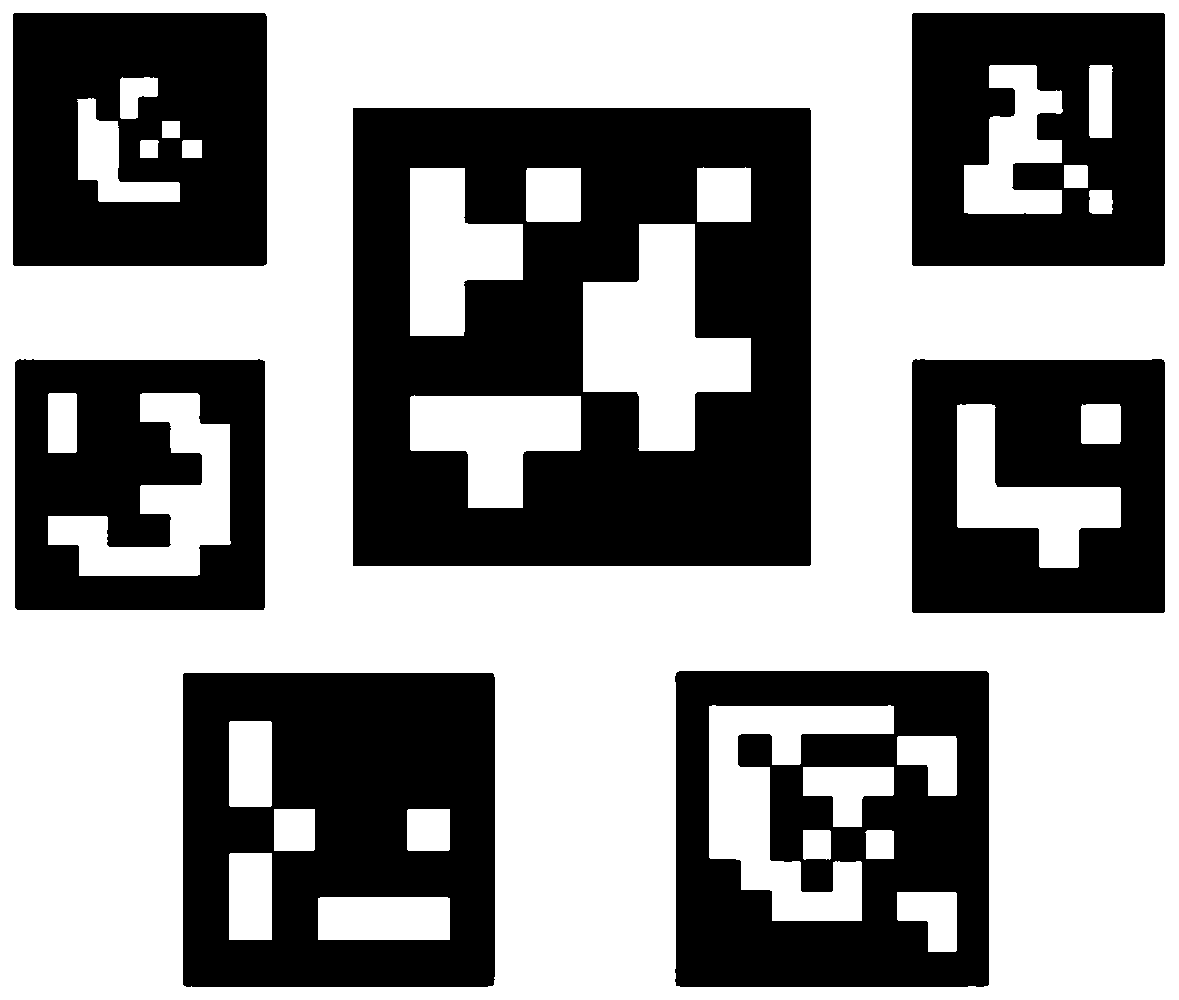
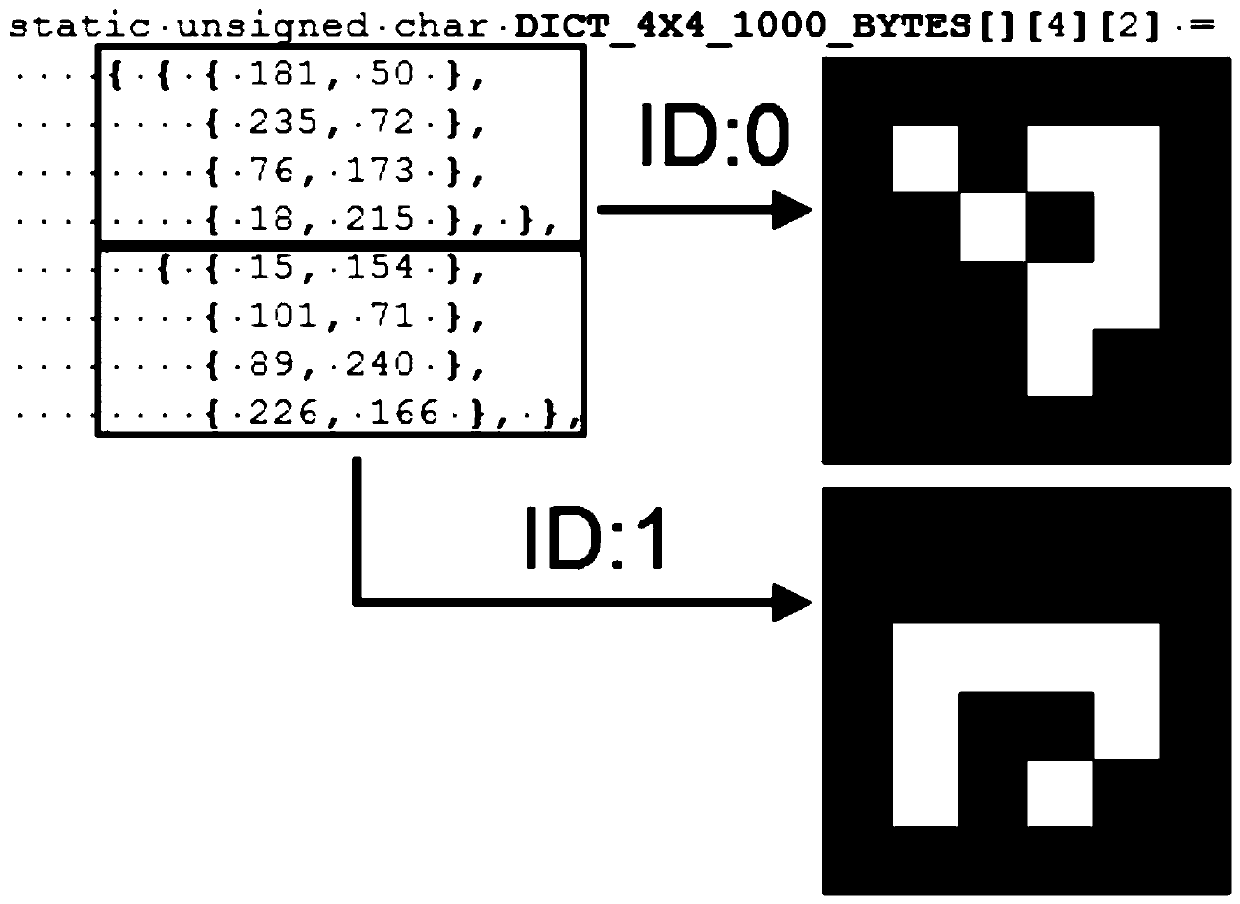
[0055] Step S1: Generate ArUco logo board. Each ArUco Marker is a binary square marker, which consists of a wide black border and an internal binary matrix, where the black border facilitates quick detection of images, and the binary code is used to determine the Marker's ID, and errors are added Detection and correction techniques for improved fault tolerance. There are many forms of Marker, and the dic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More