

Wall surface treatment robot
A technology of robot and jacking mechanism, which is applied in the direction of construction and building construction, and can solve the problems of low efficiency in manual processing of walls
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
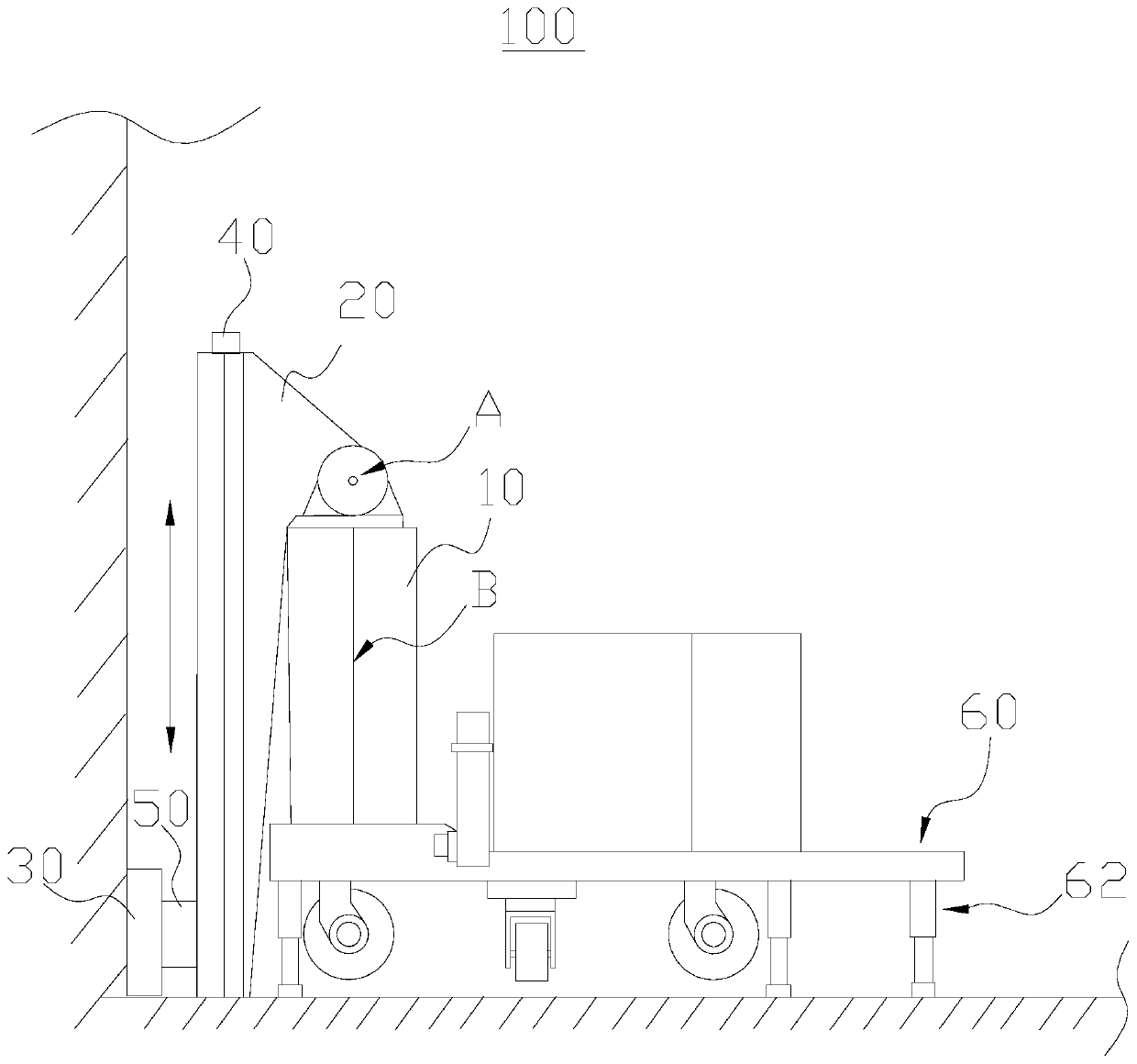
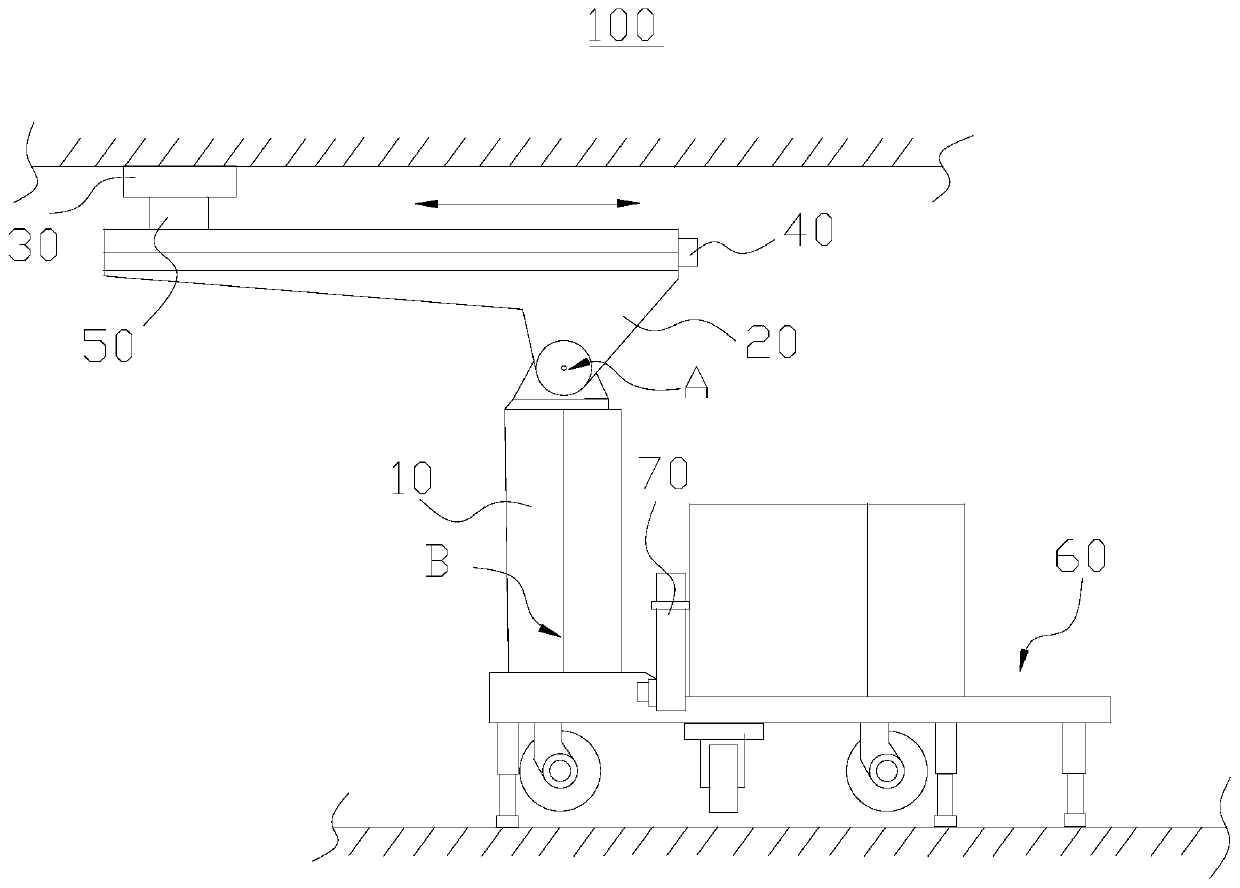
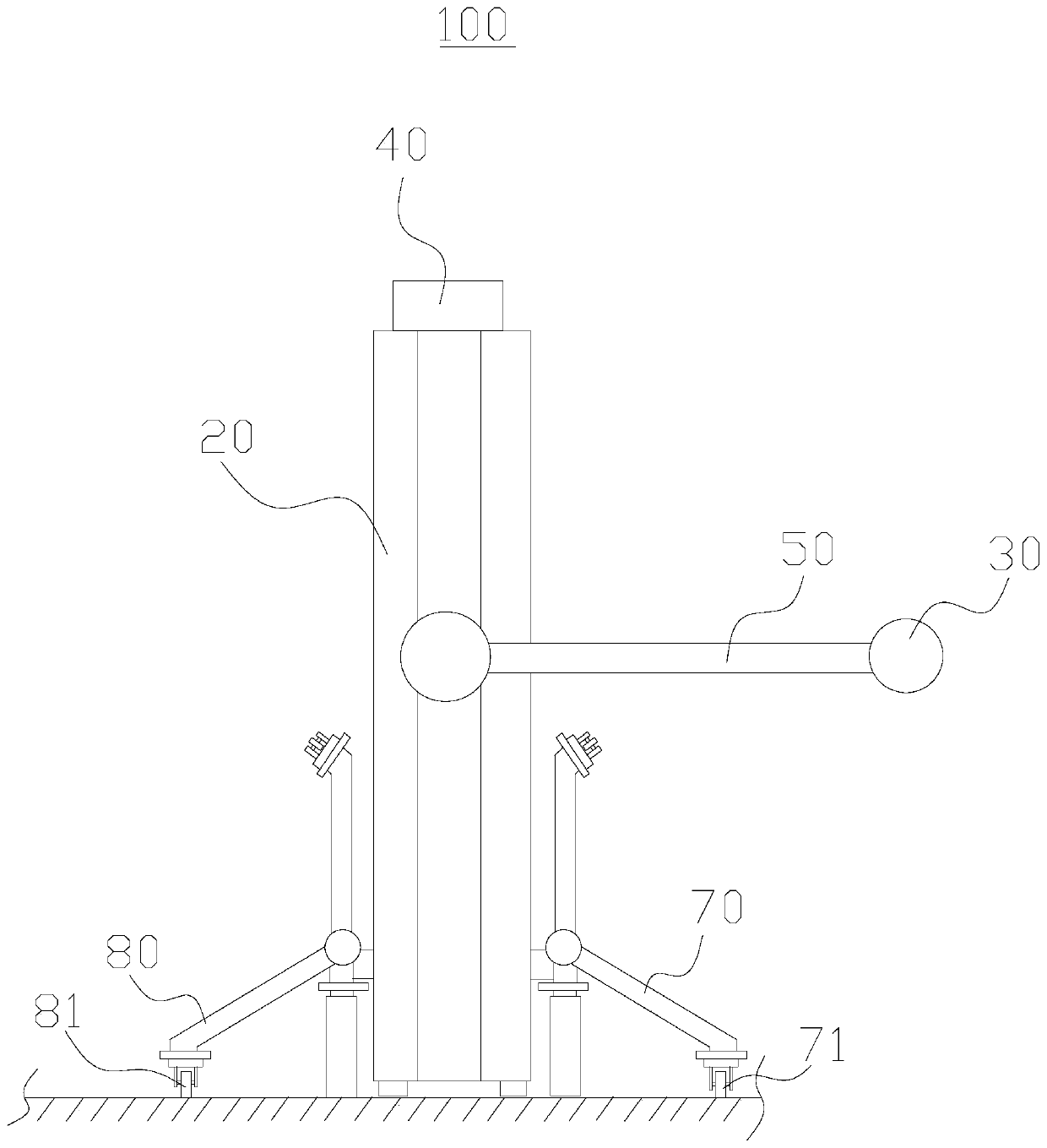
[0046] like figure 1 As shown, the embodiment of the present application provides a wall treatment robot 100 , including a first base 10 , a second base 20 , an execution end 30 and a first driving device 40 . The second base body 20 is rotatably connected to the first base body 10 around the first axis A. As shown in FIG. The execution end 30 is disposed on the second base 20 . The first driving device 40 is installed on the second base body 20 , and the first driving device 40 is used to drive the actuator end 30 to move relative to the second base body 20 to process the wall surface. The execution end 30 of the wall surface treatment robot 100 can move relative to the second base 20 to process the wall surface, so that the wall surface treatment robot 100 can perform a wide range of operations on the wall surface by moving the execution end 30 to reduce the entire wall surface treatment. The number of movements of the robot 100 complete machine improves work efficiency. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More