

Electric unmanned aerial vehicle inspection route planning method and device
A UAV and planning technology, applied in vehicle position/route/altitude control, non-electric variable control, 3D position/channel control, etc. , time-consuming and low energy consumption, etc., to achieve the effect of improving efficiency, planning speed, and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below with reference to the accompanying drawings and examples.
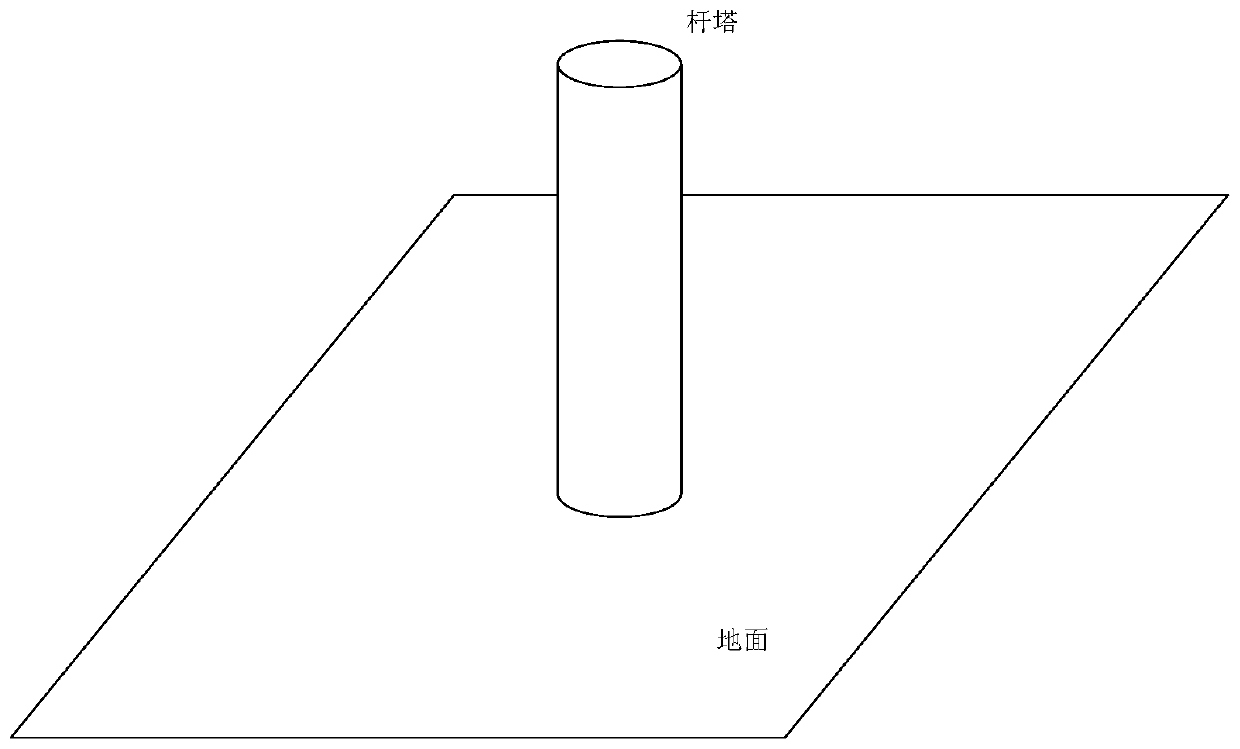
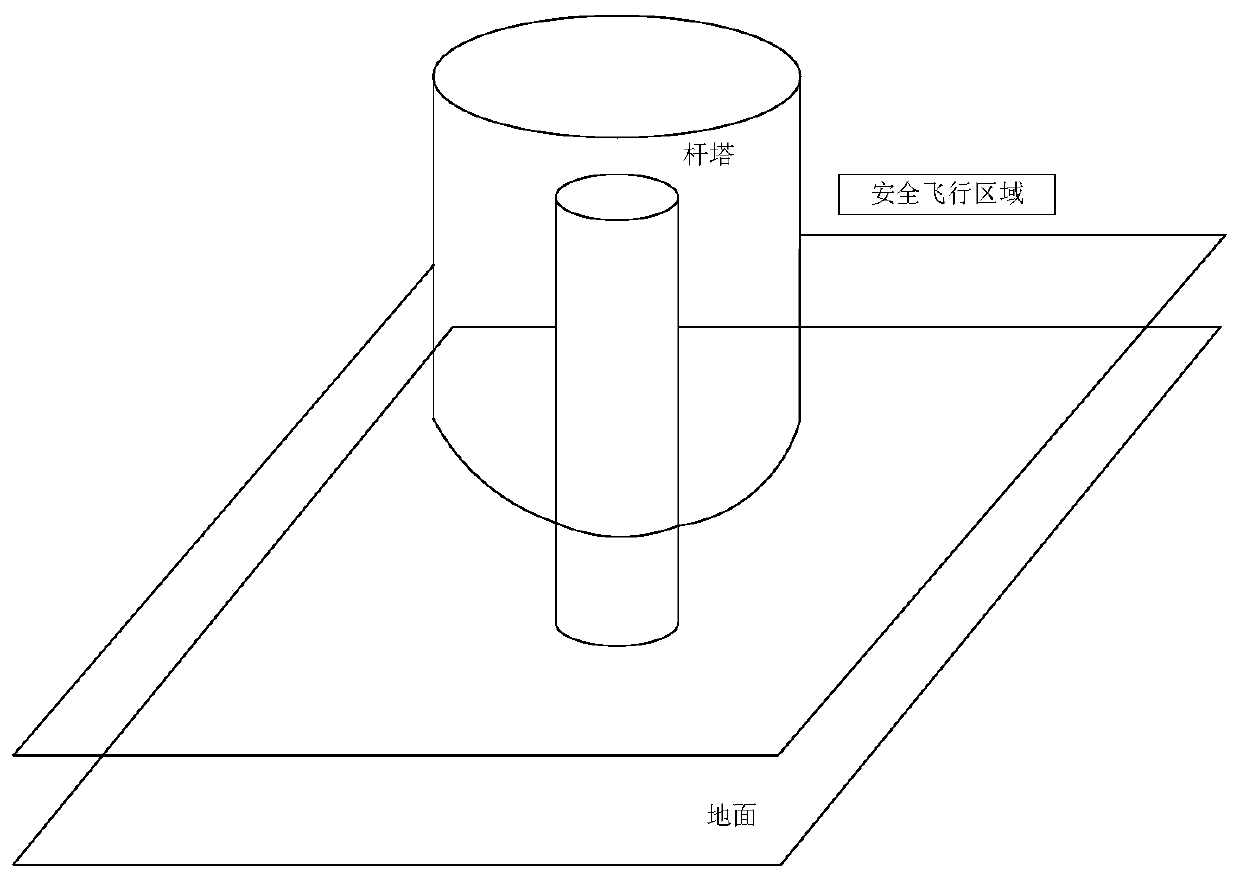
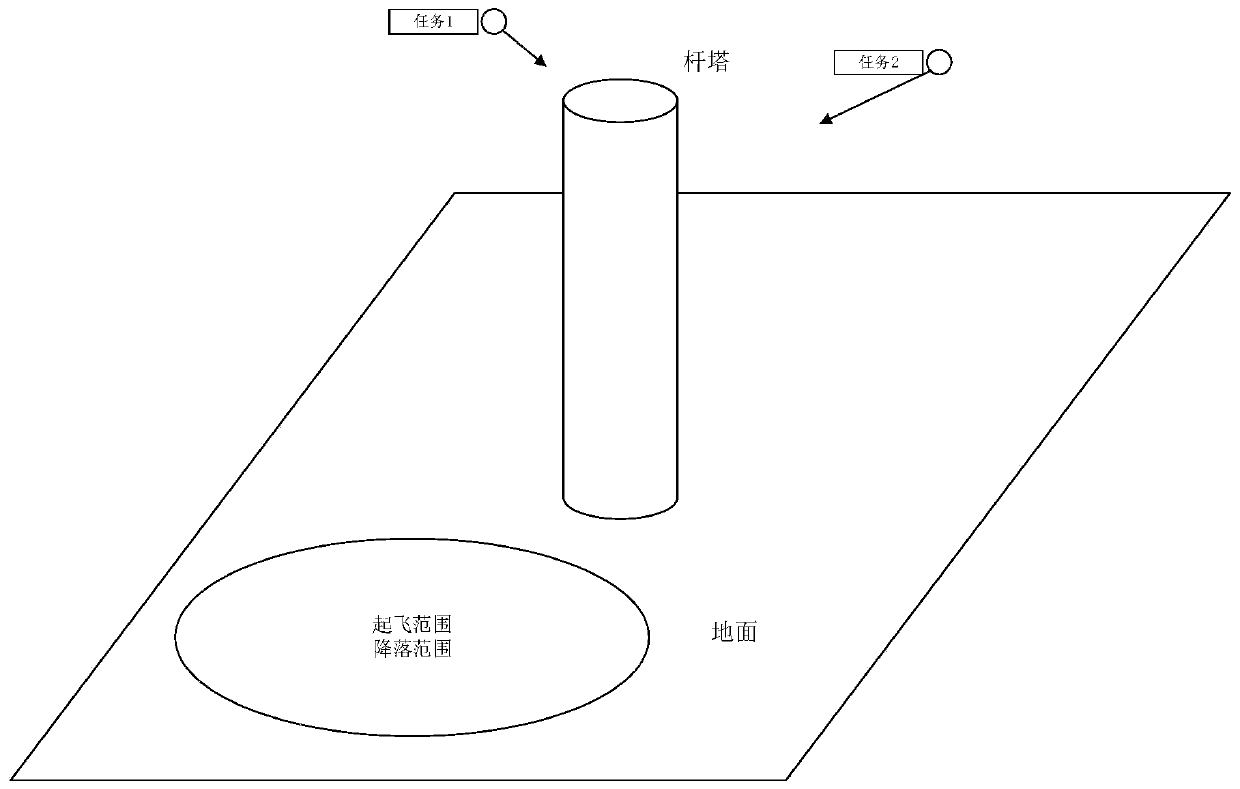
[0022] In the present invention, three-dimensional spatial modeling is performed on power facilities such as towers, lines, and sites to be inspected and their surrounding environments; parameters such as position coordinates and shooting angles of each task point included in the inspection task are sorted out to obtain a set of subtasks ; Calculate the optimal route according to the environment modeling results and task modeling results. This method has the advantages of strong security, fast planning speed, and high inspection efficiency.
[0023] combined reference Figure 1 to Figure 4 , the present invention proposes a method for planning an electric UAV inspection route, including three steps: environment modeling, task modeling, and route planning.
[0024] The environment modeling step includes two links (or called sub-steps) of space modeling an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More