

Method for carrying out pose optimization by utilizing Kalman filtering based on monocular SLAM algorithm
A Kalman filter, Kalman filter technology, applied in the field of computer vision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
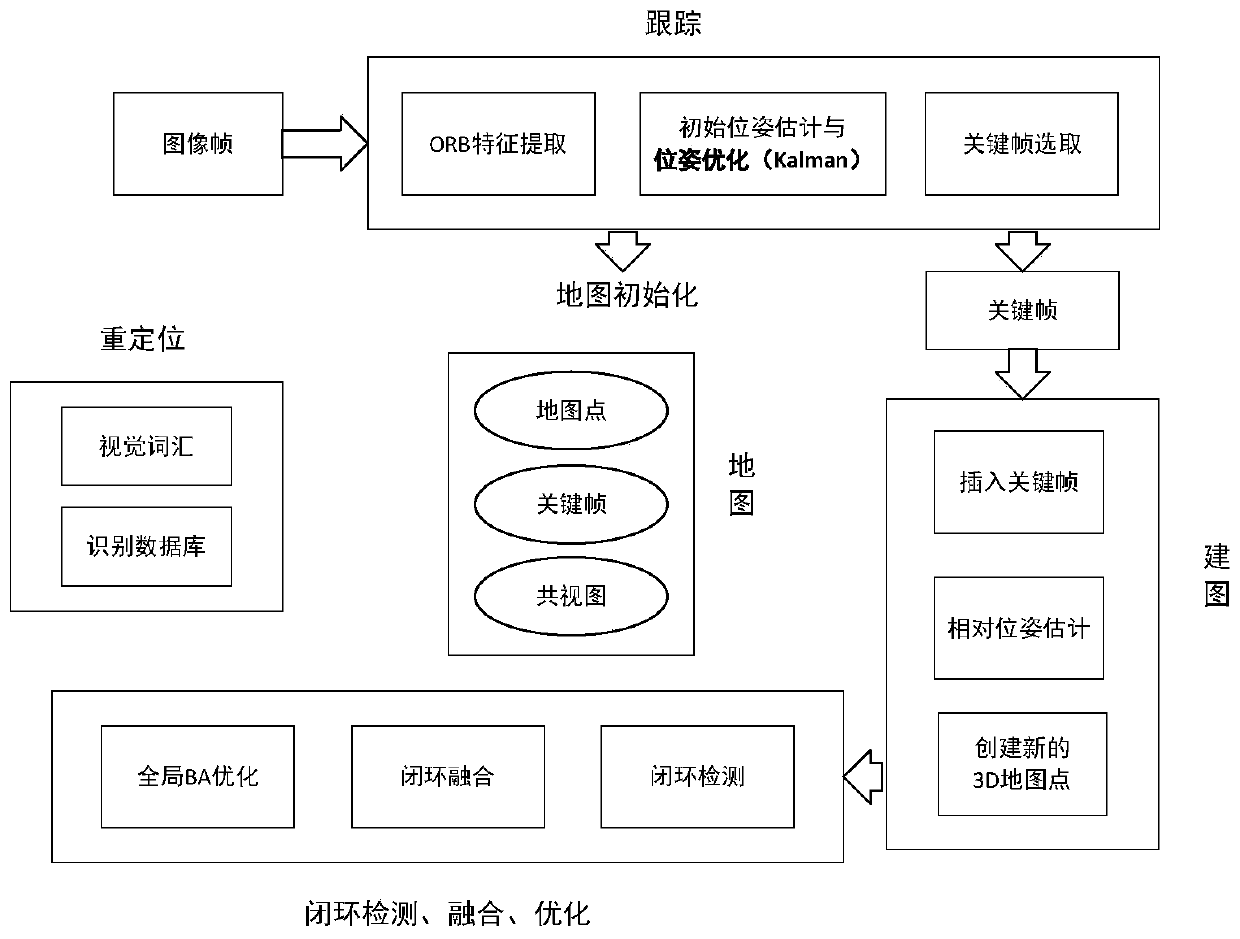
[0031] figure 1 The overall block diagram of the monocular SLAM algorithm structure for the method described in the present invention, mainly follows the idea of ORB-SLAM as a whole, and is divided into three threads: tracking, mapping and closed-loop. The present invention is mainly proposed for the pose optimization part of the monocular SLAM, with the purpose of reducing time-consuming and improving the overall real-time performance. For Kalm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More