

Unmanned taxi operation method
An unmanned and taxi technology, applied in the traffic control system of road vehicles, traffic flow detection, instruments, etc., can solve the problems of lack of intelligent analysis and determination of operation routes, redundant use of material resources, and dependence on human completion. , to achieve the effect of strengthening the market application prospects, reducing the waste of manpower, and reducing the redundant use of material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
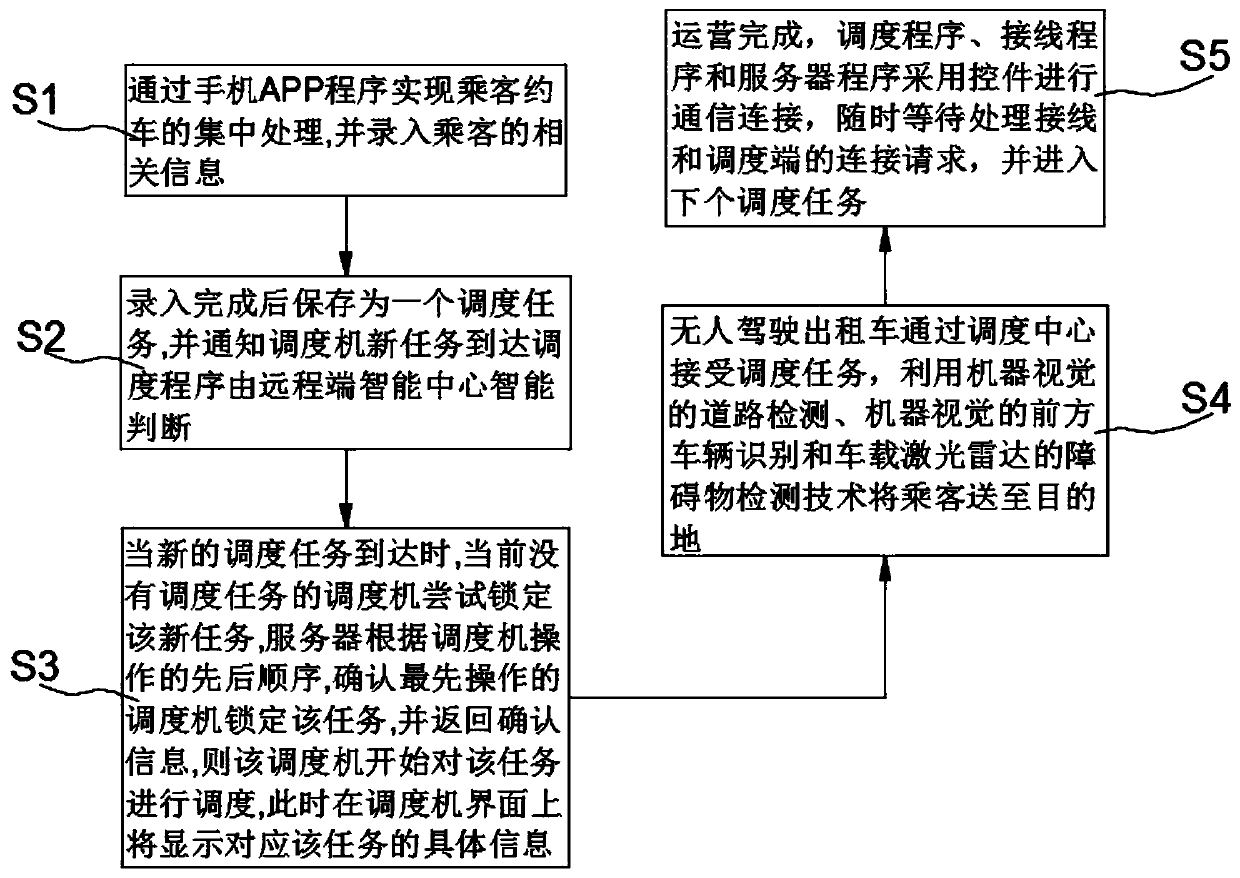
[0036] This embodiment discloses as figure 1 A driverless taxi operating method shown includes the following steps:
[0037] S1 realizes the centralized processing of passenger car booking through the mobile APP program, and enters the relevant information of passengers;
[0038] After the S2 entry is completed, it is saved as a scheduling task, and the scheduling machine is notified that the new task arrives at the scheduling program, which is intelligently judged by the remote intelligent center;
[0039] S3 When a new scheduling task arrives, the scheduler that currently does not have a scheduled task tries to lock the new task, and the server confirms that the scheduler that operates first locks the task according to the sequence of operations of the scheduler, and returns a confirmation message, then the scheduler The computer starts to schedule the task, and at this time, the specific information corresponding to the task will be displayed on the scheduling machine inte...
Embodiment 2
[0048] In this embodiment, the road detection using machine vision adopts the two-dimensional Otsu method to divide the road image into road areas and non-road areas, and then uses the Canny operator to extract the road edges and perform straight line fitting. Finally, based on the Monte Carlo method, all The posterior confidence of the fitted straight line is evaluated and the road boundaries are finally determined.
[0049] The front vehicle recognition of machine vision is based on the assumption that the histogram distribution of the vehicle area is relatively regular to verify the shadow candidate area at the bottom of the vehicle and eliminate the interference area. The left and right vertical boundaries of the candidate area are extracted through symmetrical scanning and judged. If the width of the left and right boundaries exceeds the vehicle If the pixel width has a certain ratio, the candidate area is determined to be the vehicle area.
[0050] The obstacle detection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More