

Unmanned vehicle emergency steering obstacle avoidance method based on obstacle motion prediction
A motion prediction, unmanned vehicle technology, applied in vehicle components, transportation and packaging, vehicle condition input parameters, etc., to ensure safety, reduce the incidence of traffic accidents, and improve efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
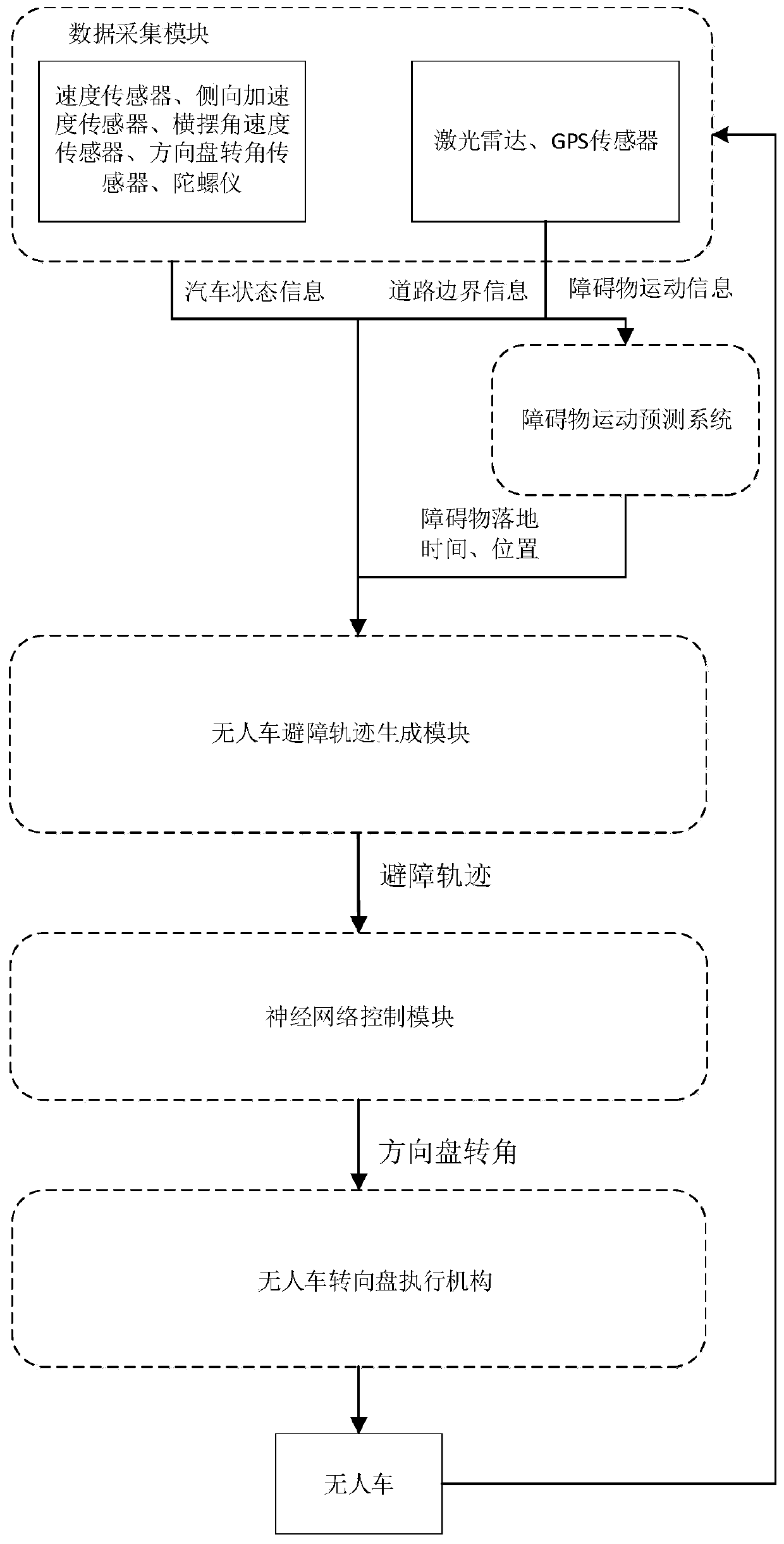
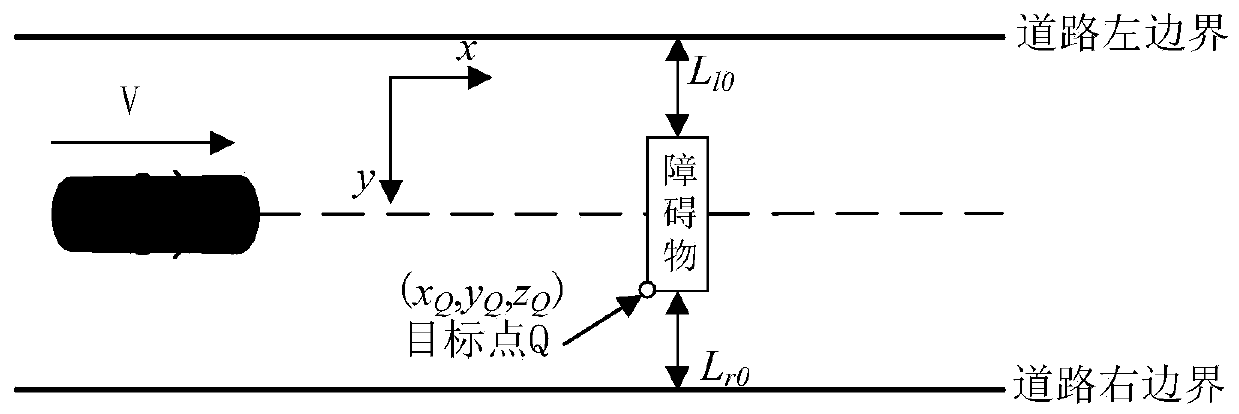
[0047] The present invention predicts the landing position of the obstacle, obtains the relative position data of the obstacle and the unmanned vehicle when it lands, generates a suitable steering and obstacle avoidance trajectory, and uses the acquired vehicle state information and the generated obstacle avoidance trajectory information to input the trained neural network The model obtains the steering wheel angle of the unmanned vehicle, controls the unmanned vehicle to track the obstacle avoidance path, and realizes steering and obstacle avoidance.
[0048] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0049] figure 1 The flow chart of emergency steering and obstacle avoidance of unmanned vehicles is shown, which includes the following steps:
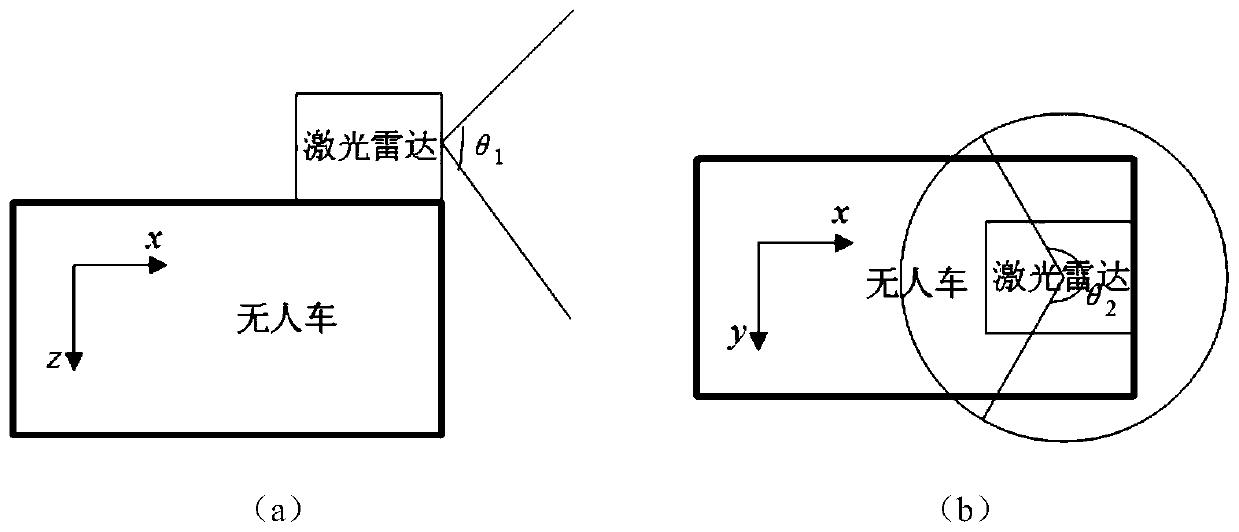
[0050] Step 1), install speed sensors, yaw rate sensors, lateral acceleration sensors, steering wheel angle sensors, gyroscopes, lidar and GPS sensors on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More