

Self-adaptive quaternion-based attitude estimation method and device
A technology of attitude estimation and quaternion, which is applied in directions such as navigation through velocity/acceleration measurement, and can solve problems such as geomagnetic interference, interference attitude, and inability to determine the attitude of the carrier
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
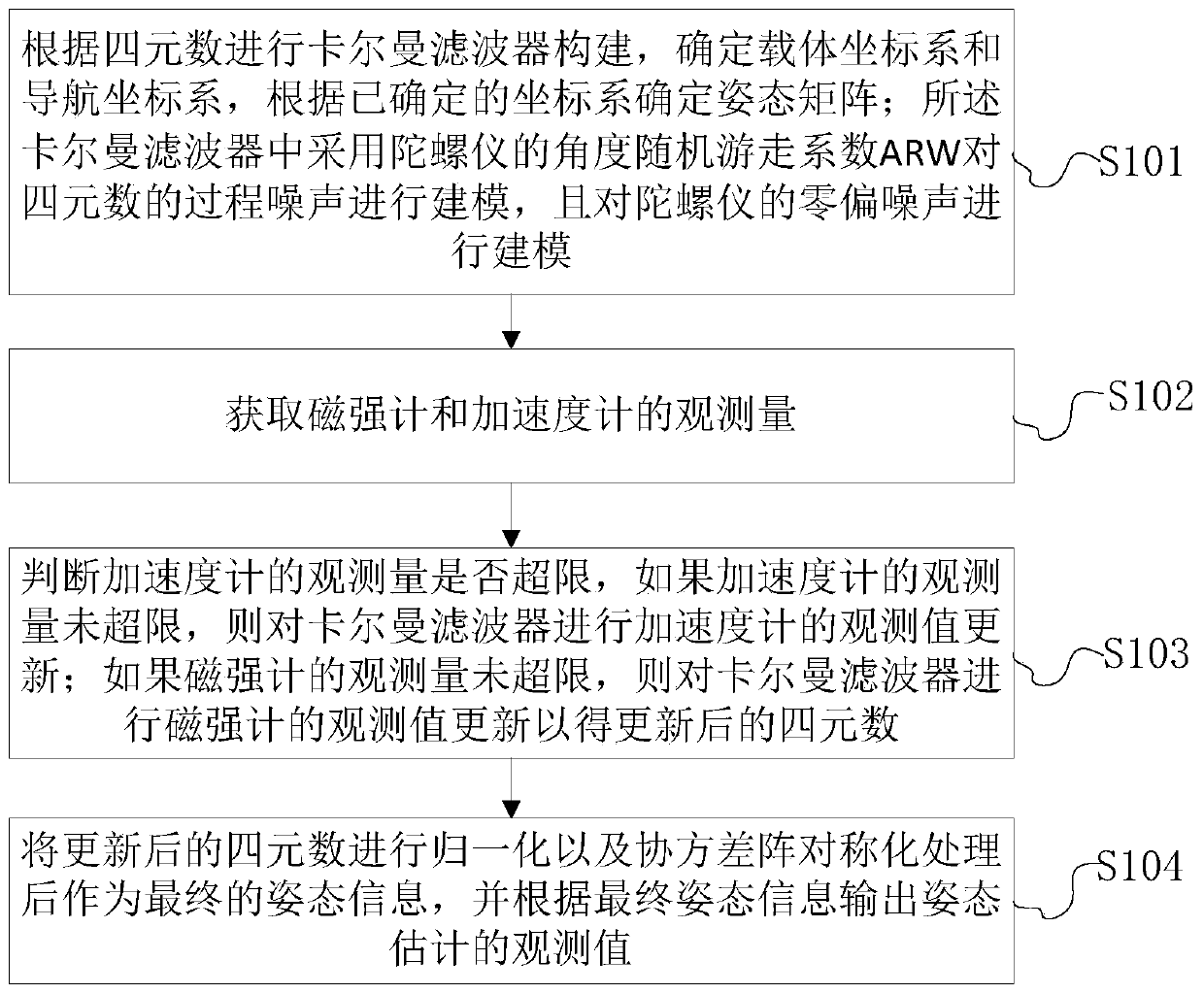
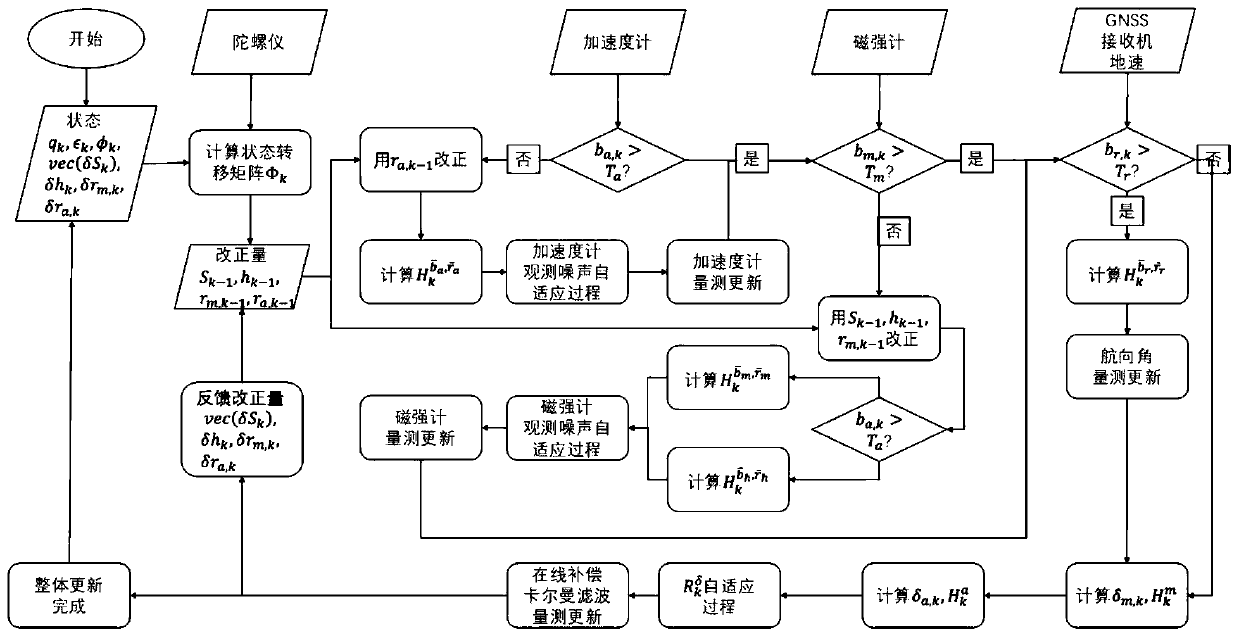
[0090] Such as figure 1 and figure 2 As shown, the present embodiment provides a method for attitude estimation based on quaternion, which is characterized in that, comprising the following steps:
[0091] S101: Construct the Kalman filter according to the quaternion, determine the carrier coordinate system and the navigation coordinate system, and determine the attitude matrix according to the determined coordinate system; the angle random walk coefficient ARW pair of the gyroscope is used in the Kalman filter The process noise of the quaternion is modeled, and the bias noise of the gyroscope is modeled; the process noise of the gyroscope bias is modeled by a first-order Gaussian Markov process.
[0092] The quaternion description attitude has its own shortcomings. The physical meaning of its four parameters is not clear, and there is no one-to-one correspondence with the three parameters of Euler angles, so it is impossible to estimate each Euler angle independently. A co...
Embodiment 2
[0203] Embodiment 2 discloses an electronic device, which includes a processor, a memory, and a program, wherein one or more processors and memories can be used, and the program is stored in the memory and configured to be executed by the processor, When the processor executes the program, a quaternion-based pose estimation method in Embodiment 1 is realized. The electronic device may be a series of electronic devices such as a mobile phone, a computer, and a tablet computer.
Embodiment 3
[0205] Embodiment 3 discloses a computer-readable storage medium, which is used to store a program, and when the program is executed by a processor, a quaternion-based attitude estimation method in Embodiment 1 is implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More