

Control algorithm for random moving target tracking trolley based on nonlinear PID
A technology of random motion and target tracking, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve the problems of overshoot and precision contradiction, and achieve the effect of improving the following efficiency and good control effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
[0018] A control algorithm based on nonlinear PID random moving target tracking dolly, including an algorithm for controlling the speed U(t) of dolly operation, the algorithm of U(t) is a proportional link P, an integral link I and a differential link The nonlinear combination of the three links of D, its time domain function is as follows,
[0019]
[0020] Where e(t) is the deviation between the position of the trolley and the target position at time t, so the purpose of this control method is to adjust the value of U(t) to stabilize the value of e(t) around 0.
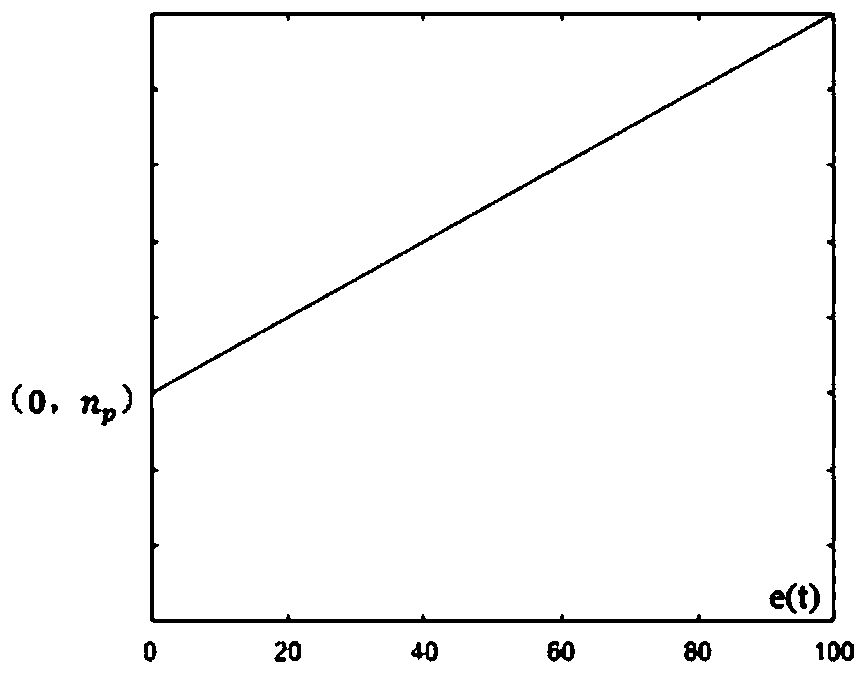
[0021] Kp[e(t)] is the proportional link P, and Kp is the gain coefficient of the proportional link P, which itself is also a function relative to e(t). Since the proportional link has the fastest response speed and the most obvious effect, the Kp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More