

Robot for assisting external limb in walking with weight bearing
A walking assistance and robot technology, applied in the field of wearable robots, can solve the problems of increasing the metabolic consumption of the human body, increasing the metabolic consumption of walking, and interfering with the voluntary movement of human body limbs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The drawings illustrate embodiments of the invention and it is to be understood that the disclosed embodiments are merely exemplary of the invention, which may be embodied in various forms and therefore specific details disclosed herein should not be construed as limiting. , but merely as a basis for the claims and as an illustrative basis for teaching one skilled in the art to variously practice the invention.
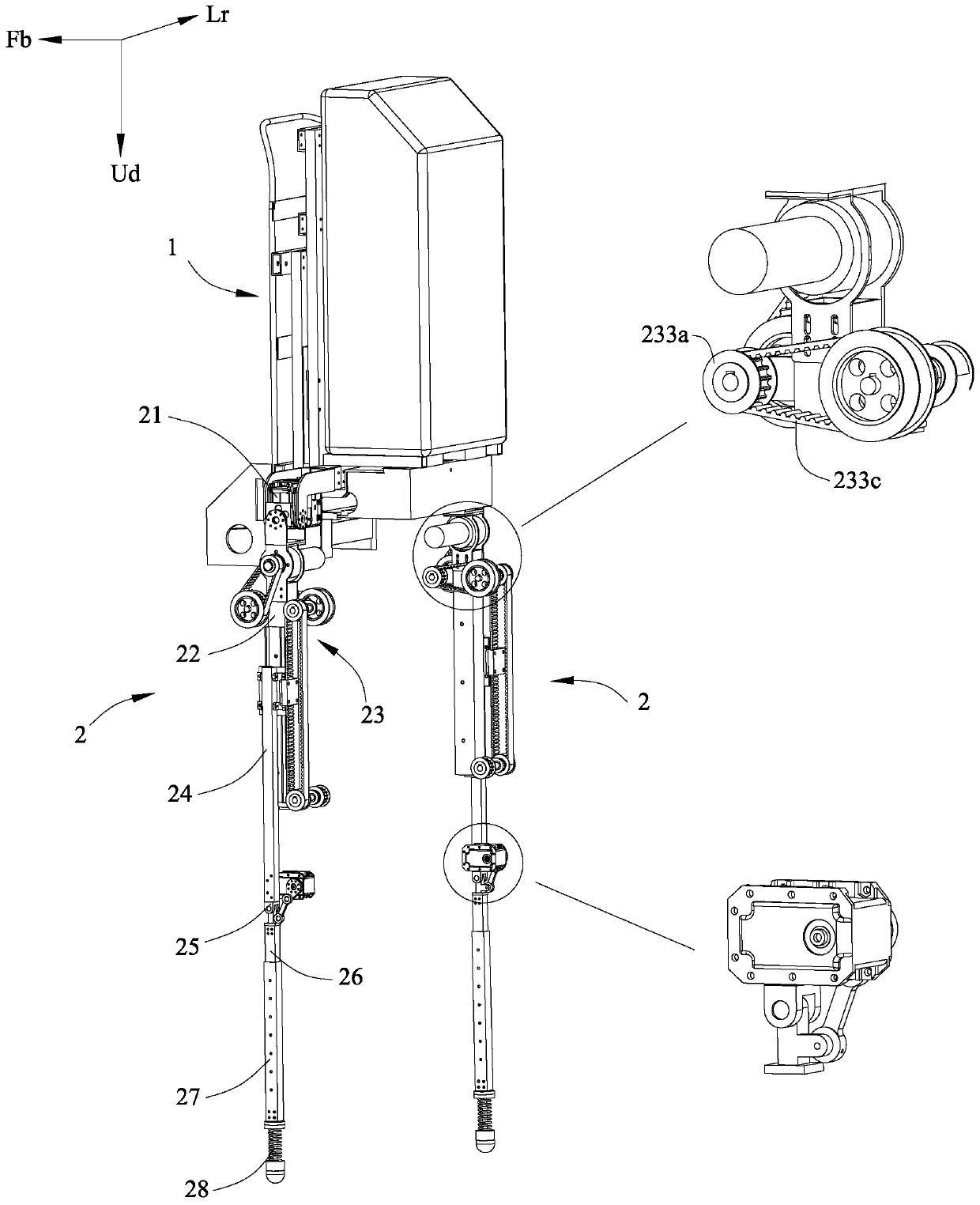
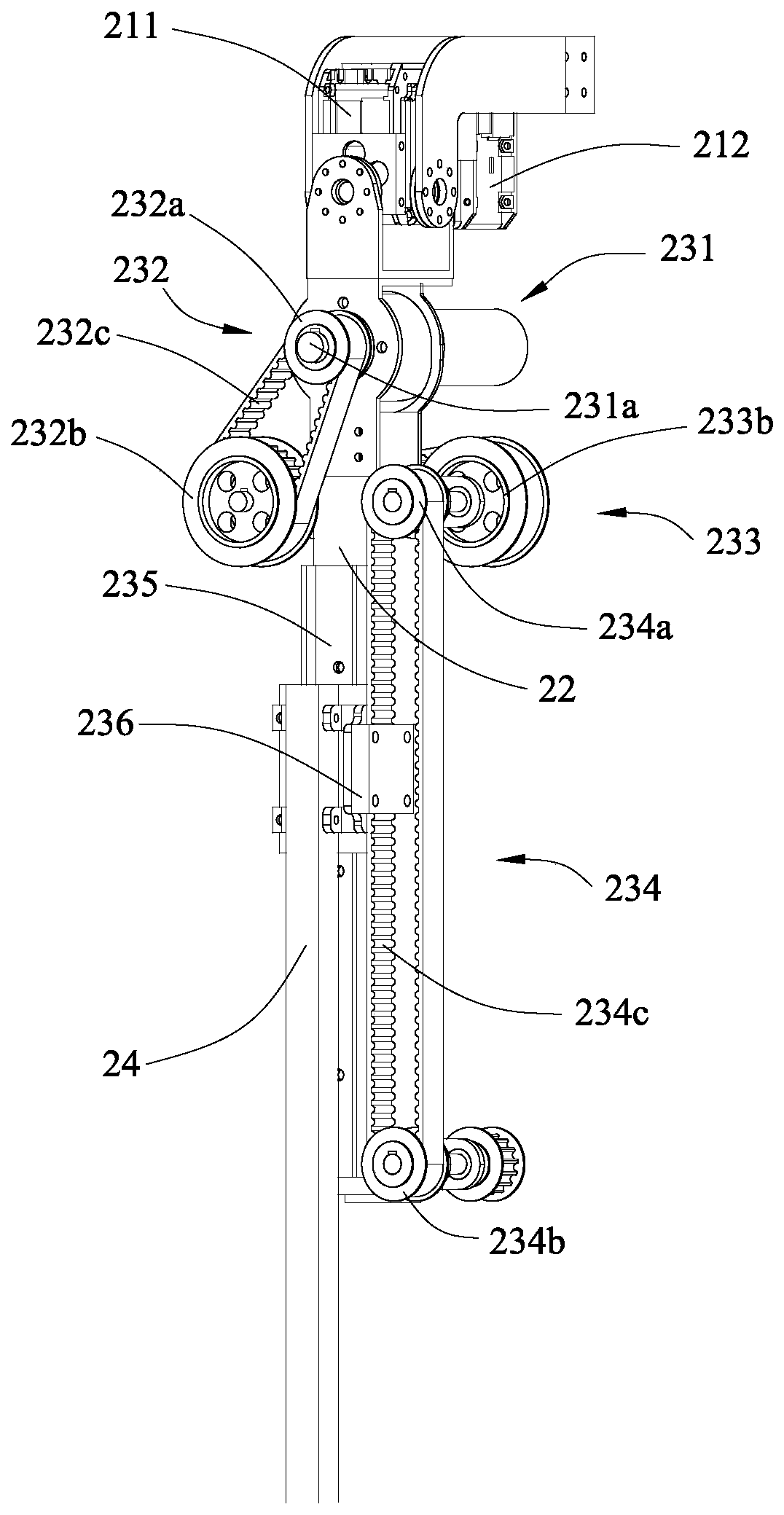
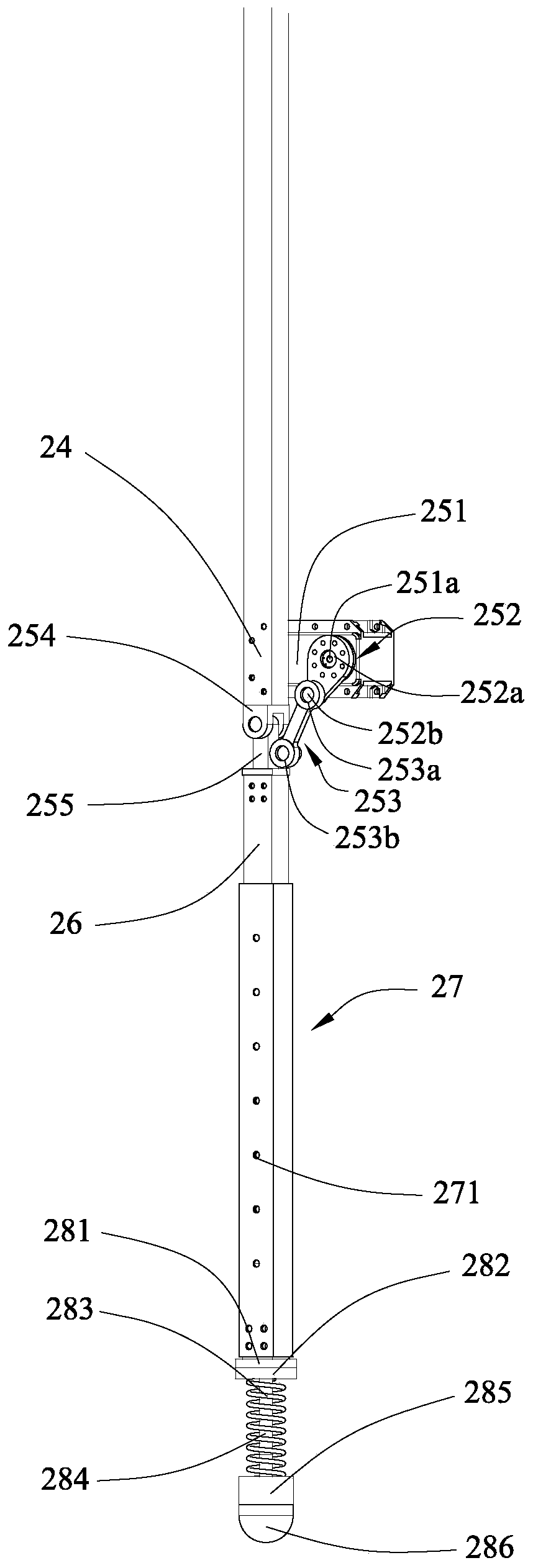
[0047] Such as figure 1As shown, the outer limb load-bearing walking auxiliary robot of the present invention includes a wearable back frame 1, two power mechanical legs 2 and a control system (not shown) that are symmetrically arranged on both sides of the wearable back frame 1; The mechanical legs 2 all include a dual-degree-of-freedom dynamic spherical hip joint 21, a main load-bearing rod 22, a main drive system 23, a thigh load-bearing rod 24, a knee joint 25, a calf load-bearing rod 26, and a support end 28; the dual-degree-of-freedom dynamic spherical hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More