

A Vision/Inertial Integrated Navigation Method Based on Online Calibration of Camera Intrinsic Parameters
A navigation method and inertial combination technology, which is applied in directions such as navigation, navigation, mapping and navigation through speed/acceleration measurement, can solve problems such as the reduction of the precision of the navigation system, and achieve the effect of solving the reduction of precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
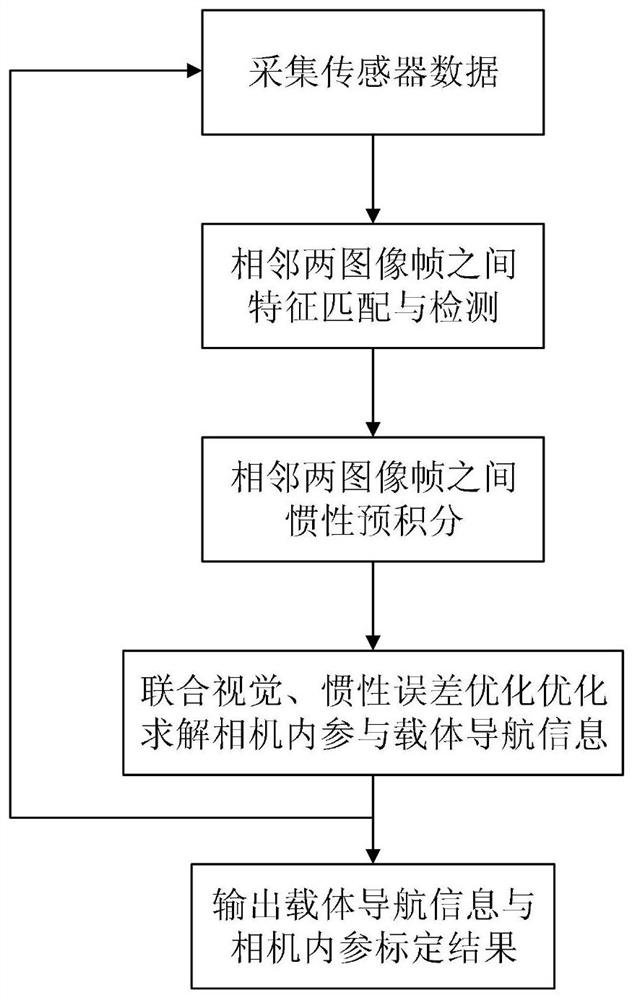
[0059] The present invention designs a visual / inertial integrated navigation method based on camera internal reference online calibration, such as figure 1 As shown, the steps are as follows:
[0060] Step 1: Collect visual sensor data S(k) and accelerometer data at time k and gyroscope data
[0061] Step 2: use the visual sensor data S(k) to perform feature matching and detection between two adjacent image frames;
[0062] Step 3: Leverage Inertial Sensor Data and Perform pre-integration between adjacent two image frames;
[0063] Step 4: Combine visual reprojection error and inertial pre-integration error to optimize and solve carrier navigation information and camera internal parameters;
[0064] Step 5: Output carrier navigation information and camera internal parameters, and return to step 1.
[0065] In this embodiment, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More