

A bridging method in gnss-ins combination
A bridging and speed technology, applied in the field of high-precision post-processing combined positioning and orientation, can solve the problems of reduced system accuracy and "sawtooth", and achieve the effect of high precision, high applicability, smooth and high-precision stable state output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
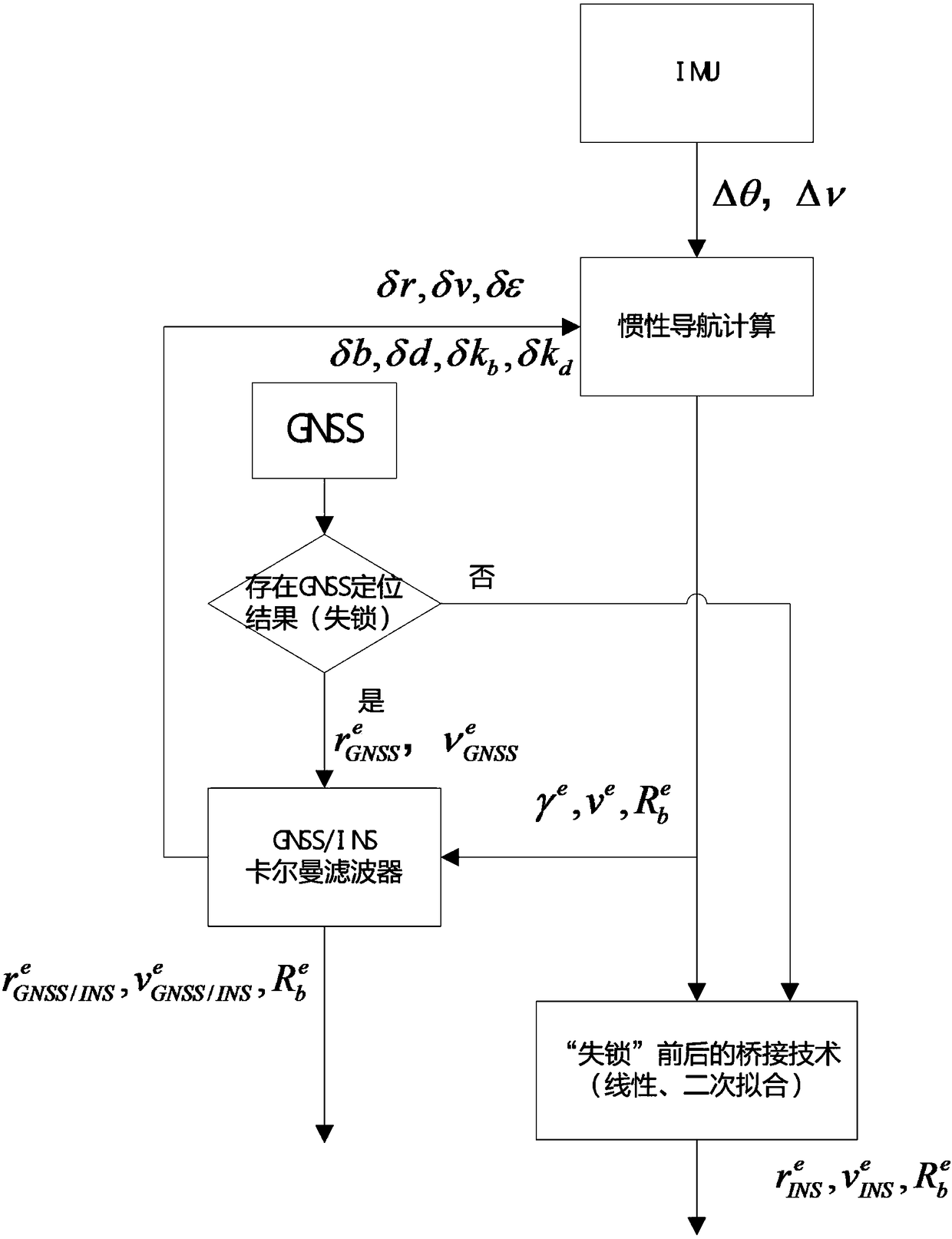
[0045] see figure 1 , in an embodiment of the present invention, a bridging method in a GNSS-INS combination specifically includes the following steps:
[0046] (1) After using the DUFCOM ambiguity search method for the carrier phase observation, the centimeter-level position value is obtained;
[0047] (2) The three-axis angular velocity output by inertial navigation and three-axis acceleration The position, velocity and attitude angle are obtained through navigation calculation under the ground-fixed system;
[0048] (3) If the GNSS satellite does not lose lock in step (1), the obtained position, velocity and the position and velocity calculated by the inertial navigation equation in step (2) form the measurement observation value in the extended Kalman filter, where The method of closed-loop correction is adopted, that is, the obtained state quantity is updated and corrected in real time to improve the accuracy of inertial navigation calculation in the next epoch;
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More