

Unmanned aerial vehicle path planning system and method for distributed encouraging spatio-temporal data exploration
A space-time data and path planning technology, applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as uneven distribution of target points and unmanned aerial vehicles unable to continuously perform long-term tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
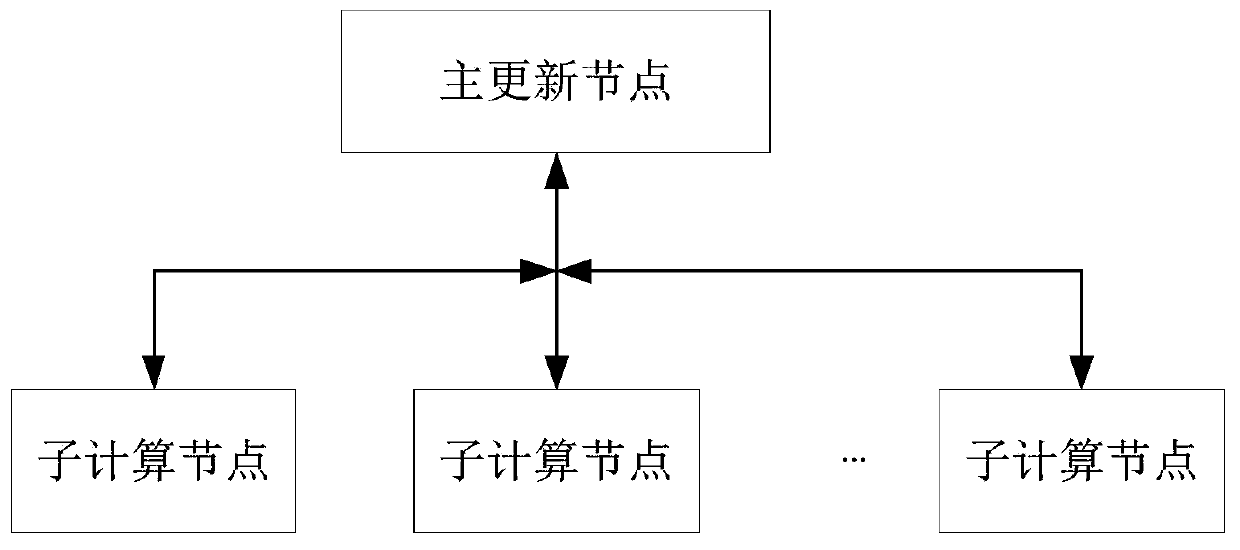
[0084] Embodiment 1: A distributed UAV path planning system that encourages spatio-temporal data exploration, such as figure 1 As shown, including: the main update node and multiple sub-computing nodes; where each sub-computing node performs calculations on multiple UAVs;
[0085] The sub-computing node is used to calculate the state information of multiple unmanned aerial vehicles and equipment in the inspection area based on the neural network learning algorithm, and push the gradient of the neural network parameters to the main update node; The main update section obtains network parameters, and performs UAV position planning and action planning based on the network parameters; and broadcasts the UAV position planning and action planning to all UAVs corresponding to the computing node;
[0086] The main update node is used to update the network parameters according to the gradients pushed by all sub-computing nodes, and publish to all sub-nodes;
[0087] Wherein, the state...
Embodiment 2
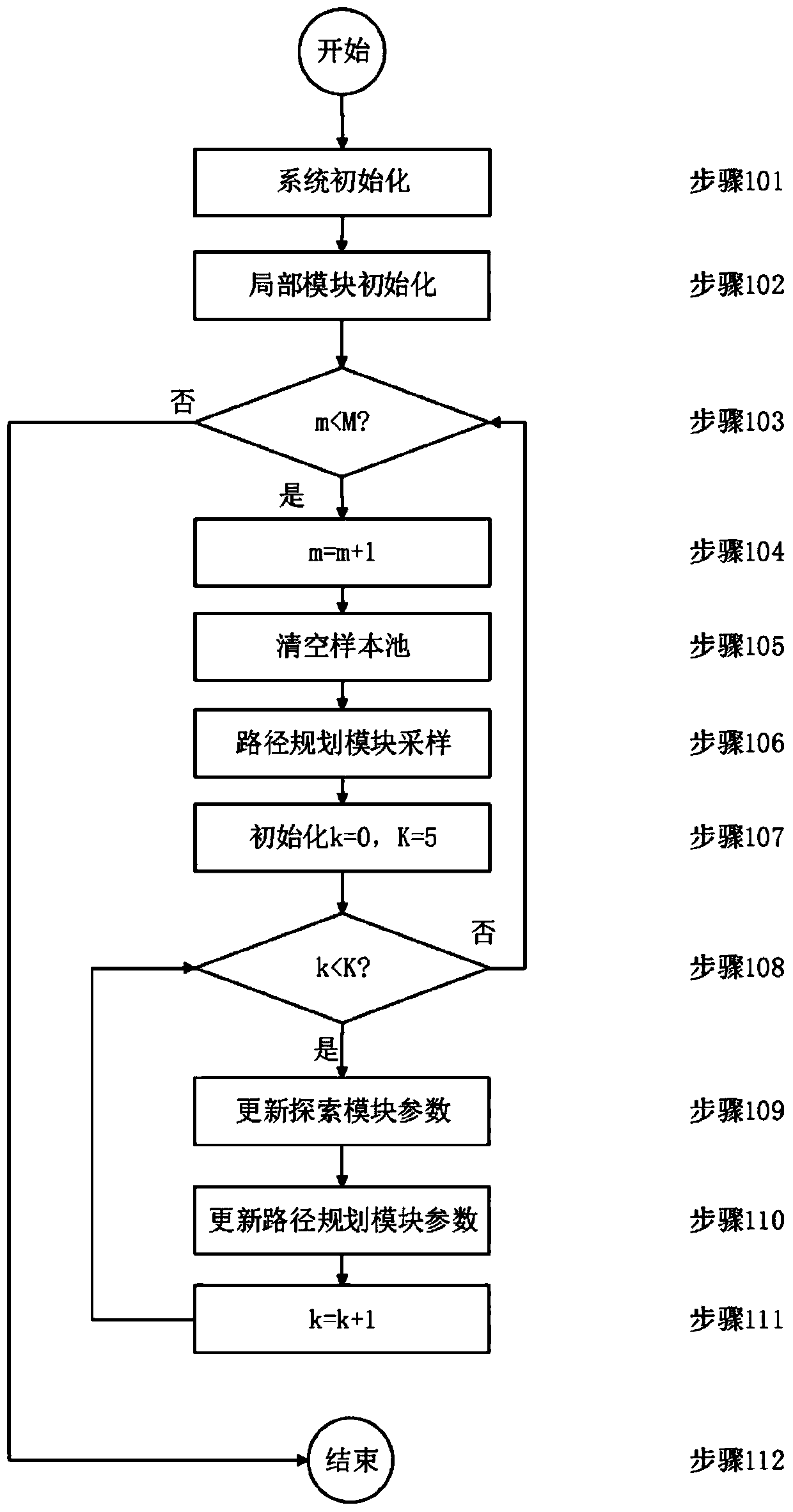
[0115] combine figure 2 , to describe this example in detail:
[0116] Step 101: system initialization.
[0117] Initialize the number of training iterations m=0, the total number of training iterations M=2500, and the number of drones N. In the general update node, the network parameters in the multi-UAV path planning module (hereinafter referred to as the path planning module) and the spatio-temporal data exploration module (hereinafter referred to as the exploration module) are randomly initialized.
[0118] Step 102: Local module initialization.
[0119] In each sub-computing node, the local path planning module and the local exploration module copy the network parameters from the global path planning module and the global exploration module respectively.
[0120] Step 103: judge m
[0121] Specifically, if m
[0122] Step 104: m=m+1.
[0123] Step 105: Empty the sample pool.
[0124] On each child compute node, empt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More