

Fuzzy adaptive elastic control method of unmanned helicopter
An unmanned helicopter, fuzzy adaptive technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of drastic changes in model parameters, without considering controller perturbation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
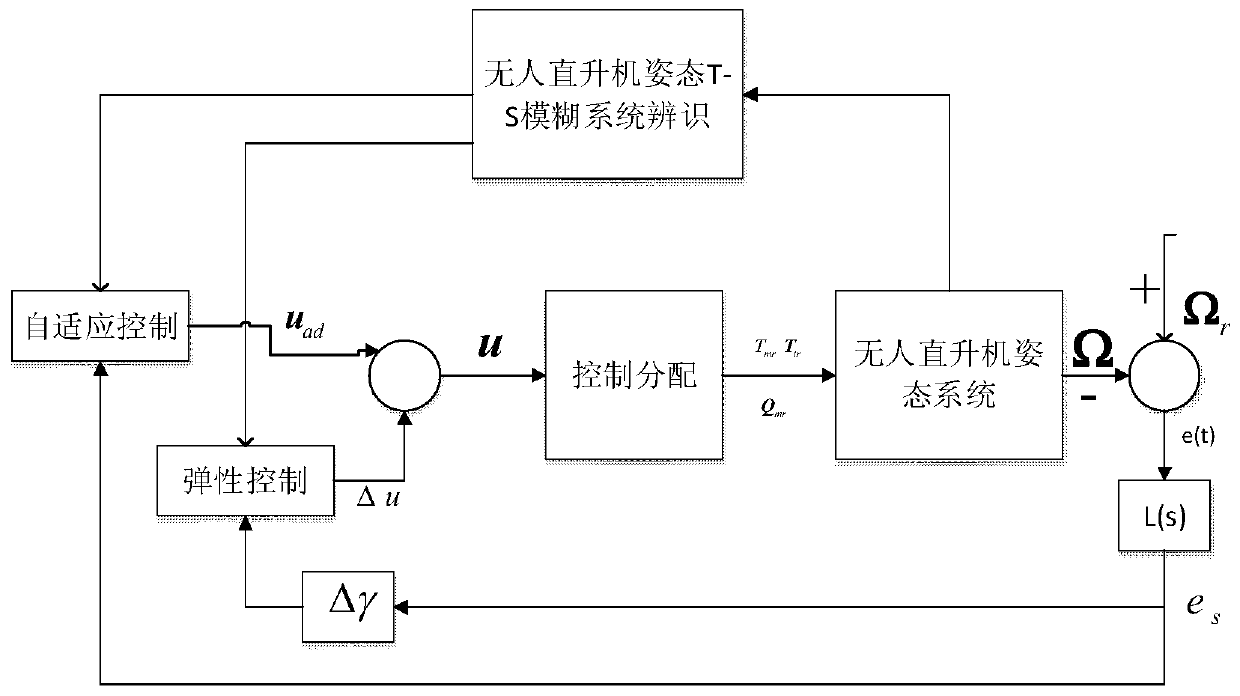
[0075] In this embodiment, the single-input single-output (SISO) system is firstly used as the research object, and then extended to the multiple-input multiple-output (MIMO) system. The specific steps are as follows:
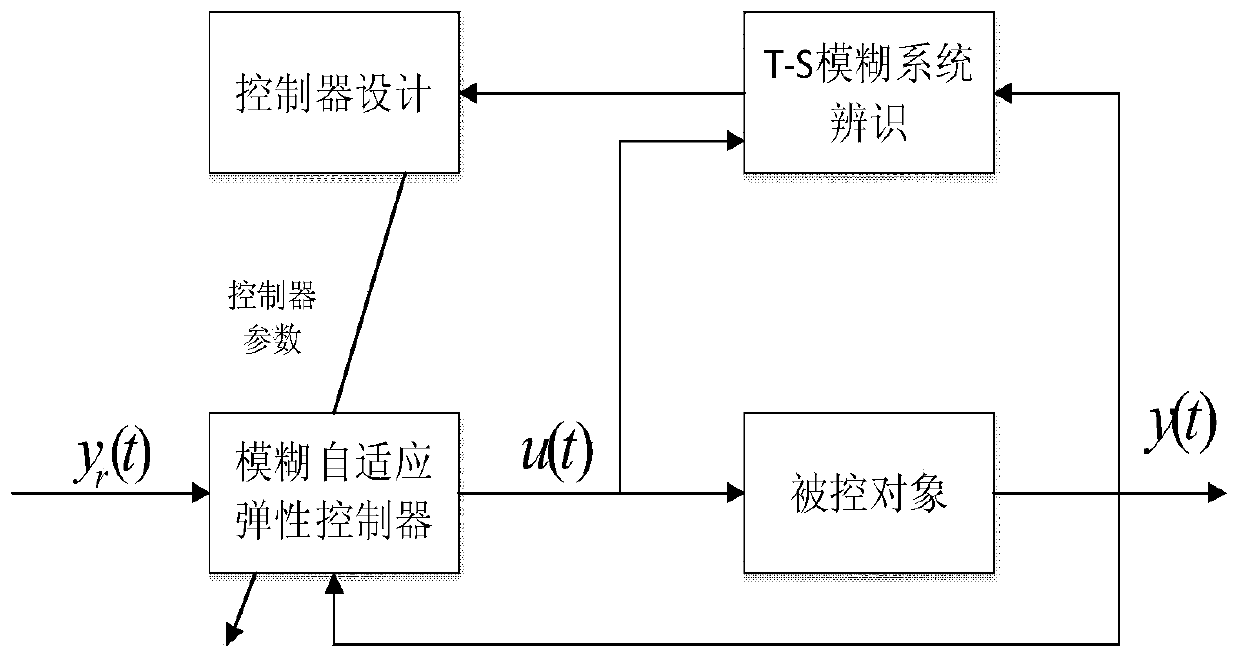
[0076] Step 1: First, for the SISO nonlinear system, use the T-S fuzzy system to estimate the unmodeled dynamics;
[0077] Step 2: Adopt indirect adaptive control, design parameter adaptive law to adjust the fuzzy identification parameters obtained in step 1 online, so that the estimated value is constantly approaching the actual value;
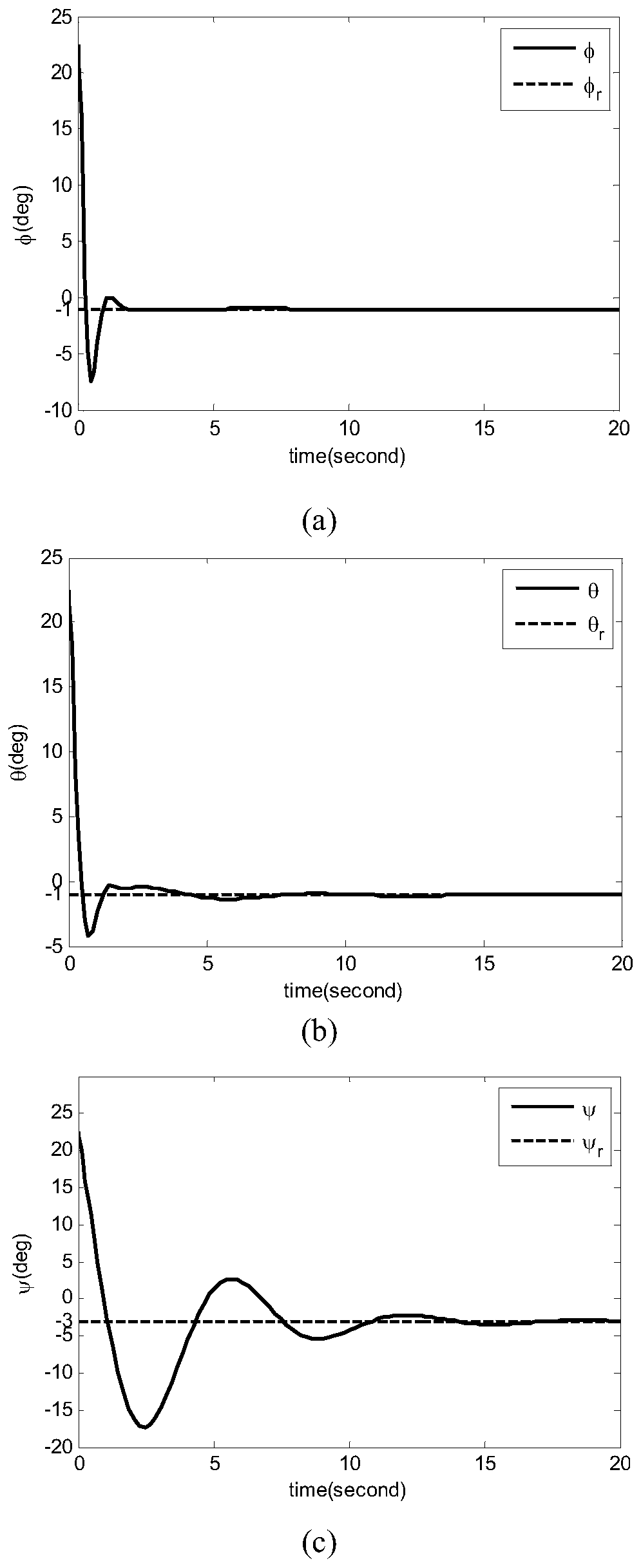
[0078] Step 3: Based on the parameter adaptive law designed in step 2, design an adaptive elastic controller to make all the signals of the system uniformly bounded and make the actual output asymptotically track the expected output;
[0079] Step 4: Construct the Lyapunov function of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More