

Method for planning and controlling gaits when biped robot suffers from external thrust disturbance in advancing direction
A bipedal robot and forward direction technology, applied in the field of robotics, can solve problems such as difficult to perceive accurately, difficult to achieve compensation control or tracking control, etc., and achieve the effect of real-time feedback and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with drawings and embodiments.
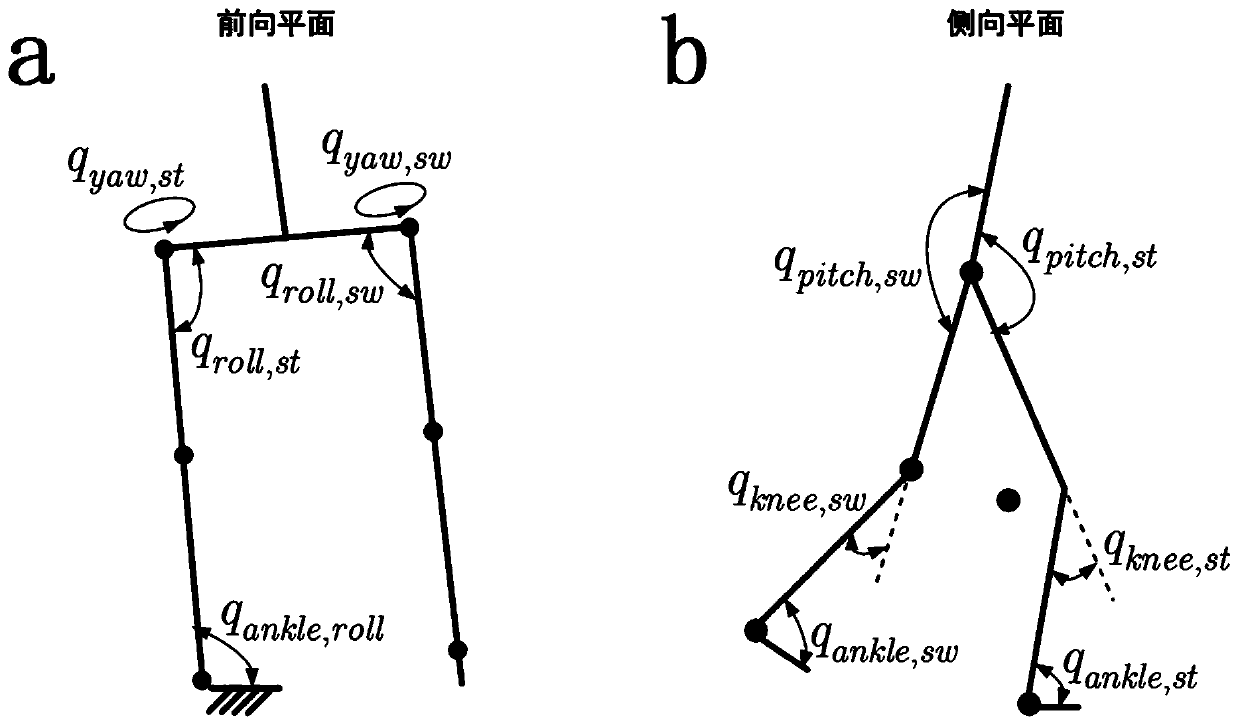
[0028] like figure 1 As shown, this embodiment considers a biped robot with 11 degrees of freedom, q ankle,roll is the degree of freedom of the supporting ankle joint in the forward plane, q ankle,st is the pitch degree of freedom of the supporting ankle joint (degrees of freedom in the lateral plane), q knee,st is the degree of freedom of the knee joint of the supporting leg, q yaw,st is the rotational degree of freedom of the hip joint of the supporting leg, q roll,st is the swing degree of freedom of the hip joint of the supporting leg, q pitch,st is the pitching degree of freedom of the hip joint of the supporting leg, q yaw,sw is the rotational degree of freedom of the hip joint of the swinging leg, q roll,sw is the swing degree of freedom of the hip joint of the swing leg, q pitch,sw is the pitch degree of freedom of the swing leg hip joint, q knee,sw is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More