

A Collaborative Planning Method for Welding Trajectory and Welding Process in Complex Space Curves
A welding process and space curve technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve problems such as lack of system planning, and achieve the effect of collaborative intelligent planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further elaborated below in conjunction with embodiment.
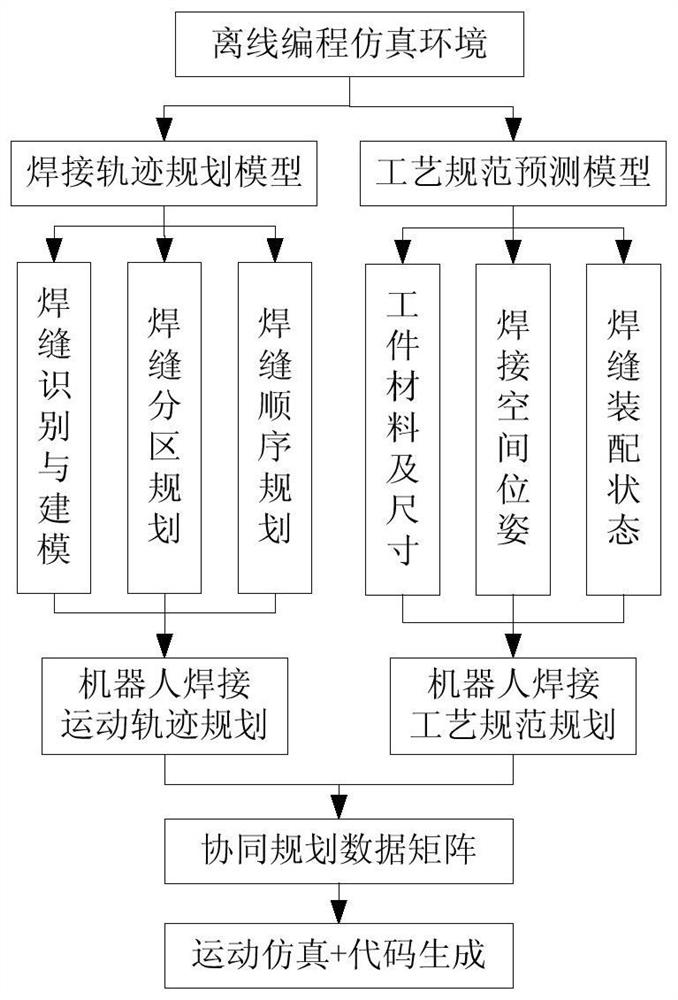
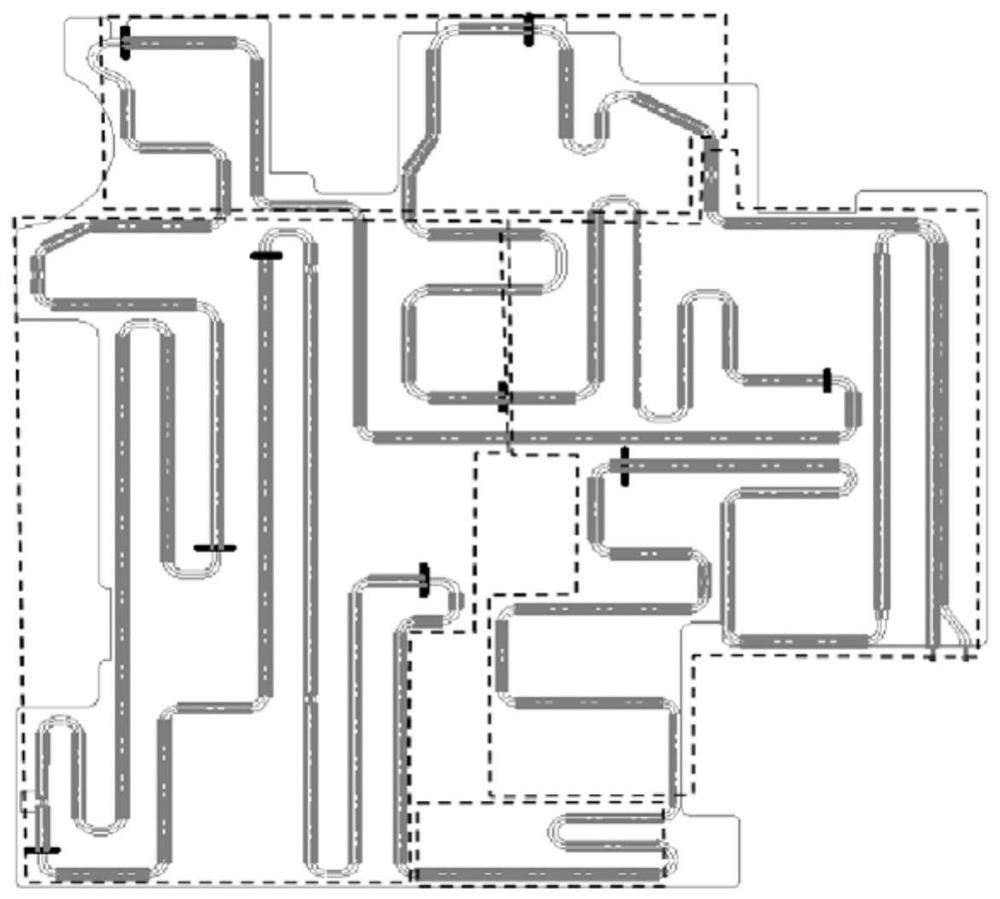
[0028] The present invention includes two main modules of robot welding trajectory planning and process specification planning, and has the functions of complex weld extraction, partition planning, welding sequence planning and welding process planning, such as figure 1 , 2 As shown, the specific technical scheme is as follows:
[0029] A method for collaborative planning of welding seam movement trajectory and welding process with complex space curves, the steps of the method include:
[0030] (1) Extract the weld profile of complex products: when the weld profile deviation between the actual complex product and its theoretical model is not greater than 2mm, select the three-dimensional profile curve of the weld to be welded from the theoretical model; the actual complex product and its theoretical model The weld profile deviation When it is larger than 2mm, the measurement param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More