

Robot monitoring method, system and device and storage medium
A technology for robots and monitoring targets, which is applied in closed-circuit television systems, parts of TV systems, parts of color TVs, etc., can solve the problems of limited monitoring range, inability to effectively find robots, and insufficient comprehensive monitoring pictures, etc., to achieve improved range, improve timeliness, and ensure normal operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
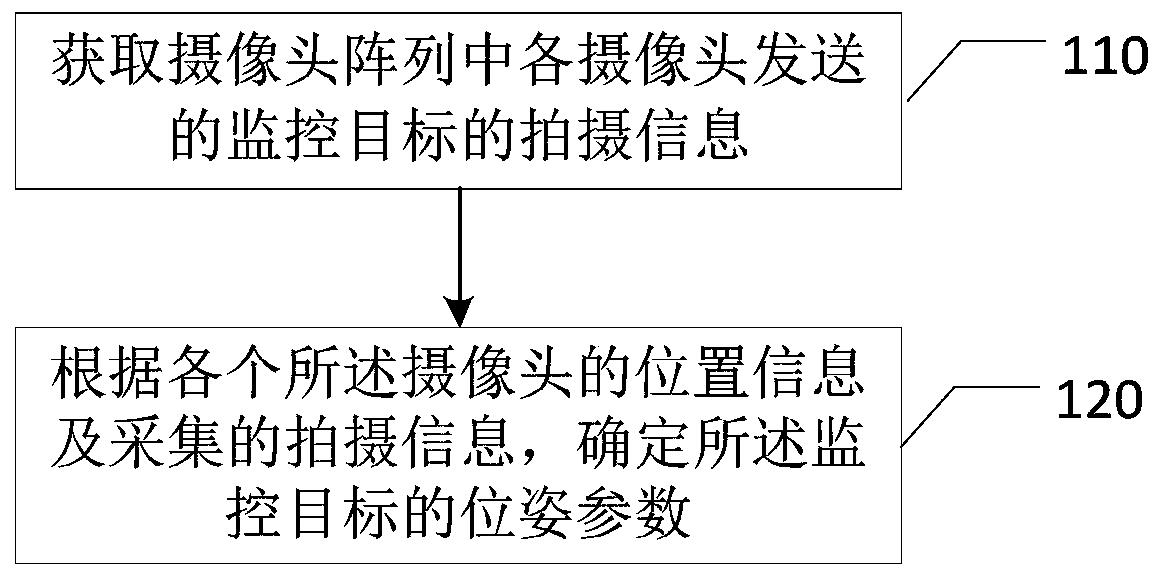
[0023] figure 1 It is a flow chart of a monitoring method for a robot provided in Embodiment 1 of the present invention. This embodiment is applicable to the monitoring of a robot, and the method can be executed by a monitoring system of a robot, such as figure 1 As shown, the method specifically includes the following steps:
[0024] Step 110, acquiring the shooting information of the monitoring target sent by each camera in the camera array.
[0025] Wherein, the camera array includes a preset number of cameras, each of which has different position information and collects shooting information of the monitoring target based on different shooting angles. The monitoring target can be a robot in working state, specifically, it can be a construction robot, an industrial robot, a service robot, etc.
[0026] Specifically, each camera in the camera array can monitor the monitoring target in real time, and generate shooting information, which can be a picture or a video, and send...
Embodiment 2
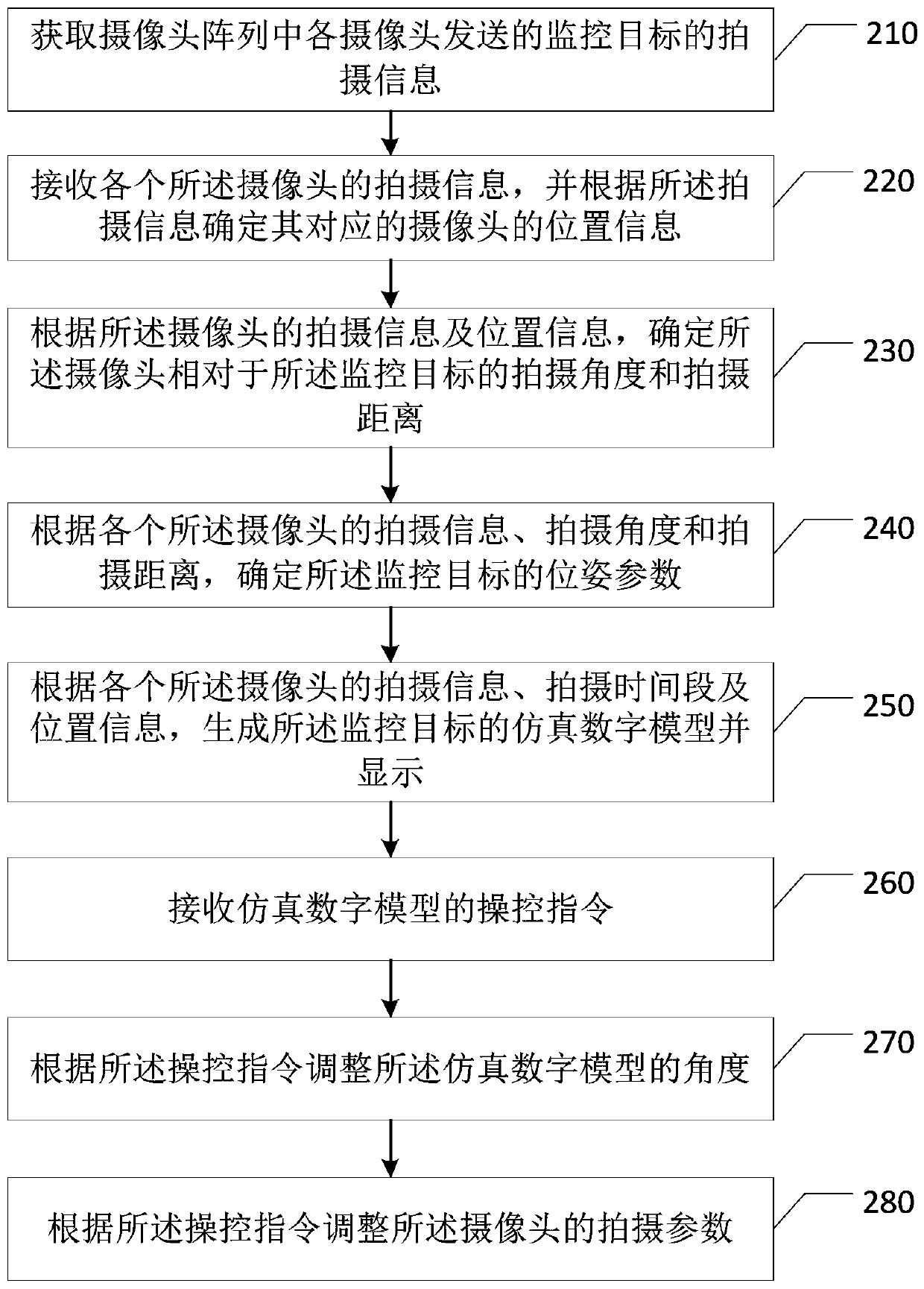
[0045] figure 2It is a flow chart of a robot monitoring method provided by Embodiment 2 of the present invention. This embodiment is a further refinement and supplement to the previous embodiment. The robot monitoring method provided by the embodiment of the present invention also includes: according to each The shooting information, shooting time period and position information of the camera, generate and display the simulated digital model of the monitoring target; receive the manipulation instruction of the simulated digital model; adjust the angle of the simulated digital model according to the manipulation command; according to the The manipulation instruction adjusts shooting parameters of the camera, wherein the shooting parameters include at least one of shooting mode, shooting time, shooting sequence, and shooting angle.
[0046] Such as figure 2 Shown, the monitoring method of this robot comprises the steps:
[0047] Step 210, acquiring the shooting information o...
Embodiment 3
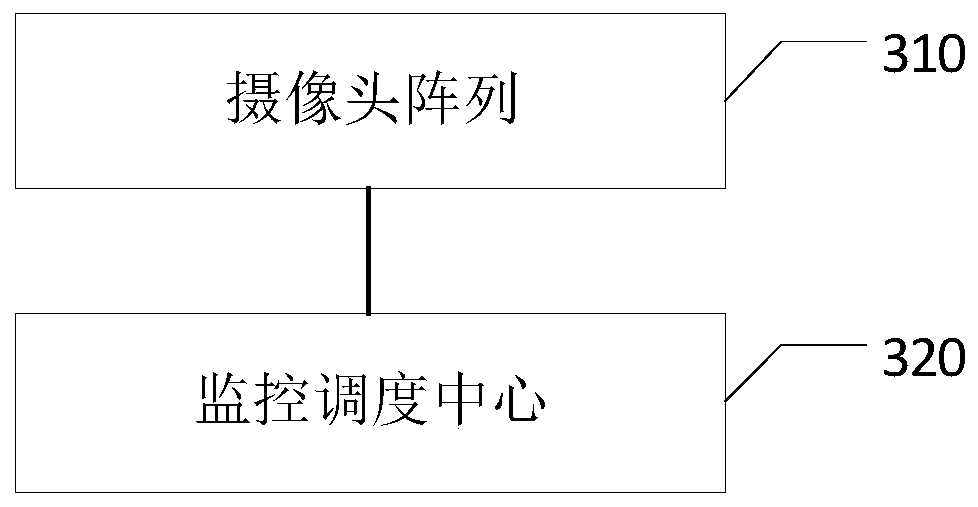
[0070] Figure 3A It is a schematic structural diagram of a robot monitoring system provided in Embodiment 3 of the present invention, as Figure 3A As shown, the system includes: a camera array 310 and a monitoring dispatch center 320 .
[0071] Wherein, the camera array 310 includes a preset number of cameras, and each of the cameras collects shooting information of the monitoring target based on different shooting angles; the monitoring and dispatching center 320 communicates with each camera, and executes the camera provided by any embodiment of the present invention. Monitoring methods for robots.
[0072] According to the technical solution of the embodiment of the present invention, a plurality of cameras with different positions and angles are set around the monitoring target for monitoring, and the monitoring target is monitored in all directions, and the pose of the monitoring target is determined according to the shooting information and positions collected by each...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More