

Stacked object 6D pose estimation method and device based on deep learning
A deep learning and pose estimation technology, applied in computing, computer parts, character and pattern recognition, etc., can solve the problems of consuming large computing time and computer memory, relying on manual debugging, etc., to achieve accurate pose estimation and training speed. And the effect of fast running speed and strong algorithm generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention will be described in detail below. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
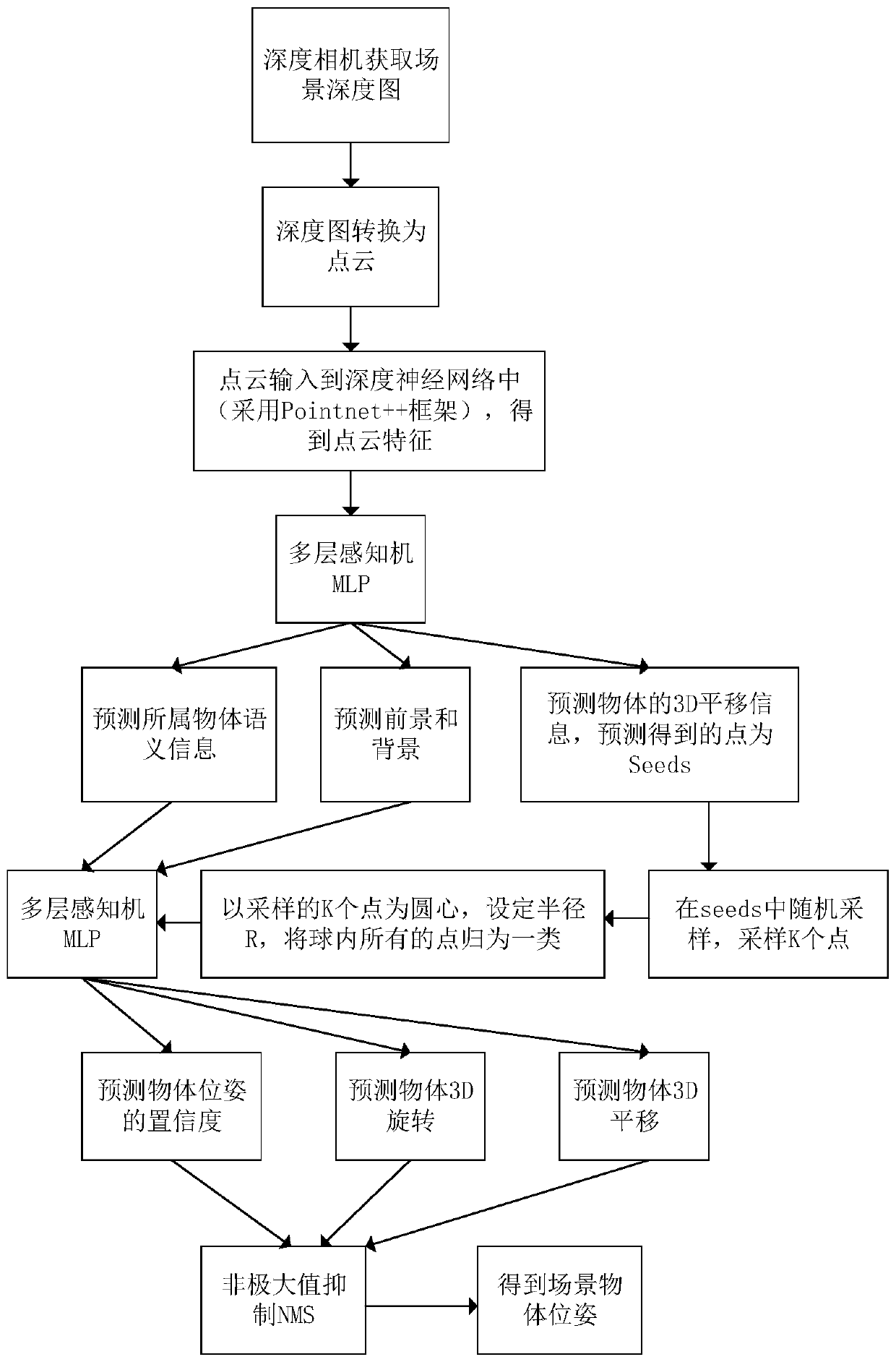
[0039] image 3 It is a flowchart of a 6D pose estimation method for stacked objects based on deep learning according to an embodiment of the present invention. refer to image 3 , the embodiment of the present invention proposes a method for estimating the 6D pose of a stacked object based on deep learning, including the following steps:
[0040] S1. Input the point cloud of scene depth information obtained by the depth camera into the point cloud deep learning network to extract point cloud features;
[0041] S2. Through the multi-layer perceptron MLP, the extracted point cloud features learn to return the semantic information of the object, the foreground and background of the scene, and the 3D translation information of the object. The points obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More