Robot capable of crossing obstacles and obstacle crossing method of robot capable of crossing obstacles
A robot and obstacle-crossing technology, applied in the field of robotics, can solve problems such as robots being unable to move and affecting normal work.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
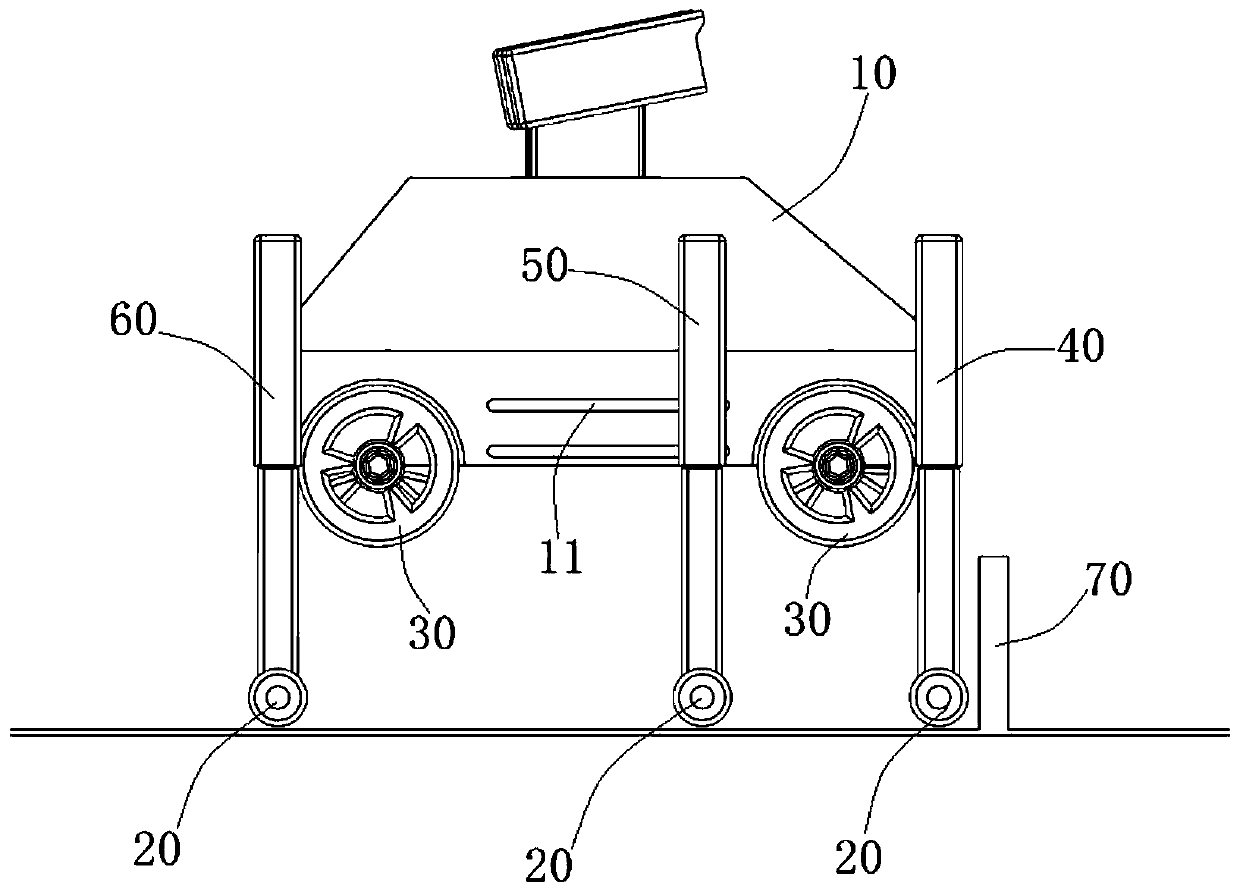
[0043]The barrier-crossing robot provided in this embodiment includes a car body 10, a support assembly and a first road wheel 20, wherein the support assembly is installed on the car body 10, and when the support assembly drives the first road wheel 20 close to the car body 10, the car body The body 10 can walk on the barrier-free road surface by itself to carry out the set work. When encountering an obstacle 70, at least two sets of support assemblies can drive the corresponding first road wheels 20 away from the vehicle body 10 to raise the vehicle body 10, so that the vehicle body 10 and the first road wheels 20 connected to the remaining support assemblies are all high. For the obstacle 70, at this time, the first road wheel 20 far away from the car body 10 works, that is, it can drive the obstacle-crossing robot to partially cross the obstacle 70; when the first road wheel 20 driving the car body 10 is about to contact the obstacle 70, The supporting assembly correspondi...
Embodiment 2
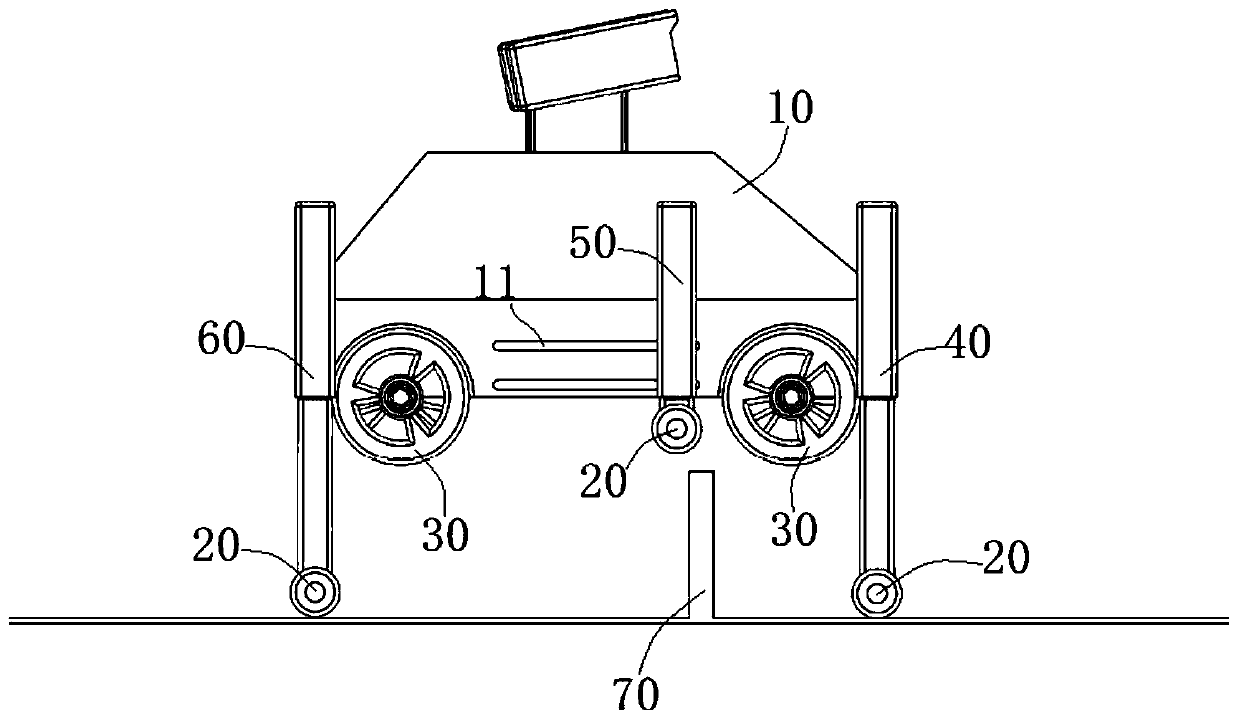
[0067] This embodiment provides an obstacle-crossing method for a robot that can cross obstacles, using the robot that can cross obstacles described in any one of the preceding embodiments, and taking the obstacle 70 as a mouse guard as an example, including the following steps:
[0068] The second road wheel 30 works to drive the car body 10 to advance until it encounters the mouse guard;
[0069] refer to figure 1 , the front support assembly 40, the middle support assembly 50 and the rear support assembly 60 all drive the corresponding first road wheels 20 to descend, so that the vehicle body 10 is lifted off the ground, and the lowest point of the second road wheels 30 is higher than the mouse guard;
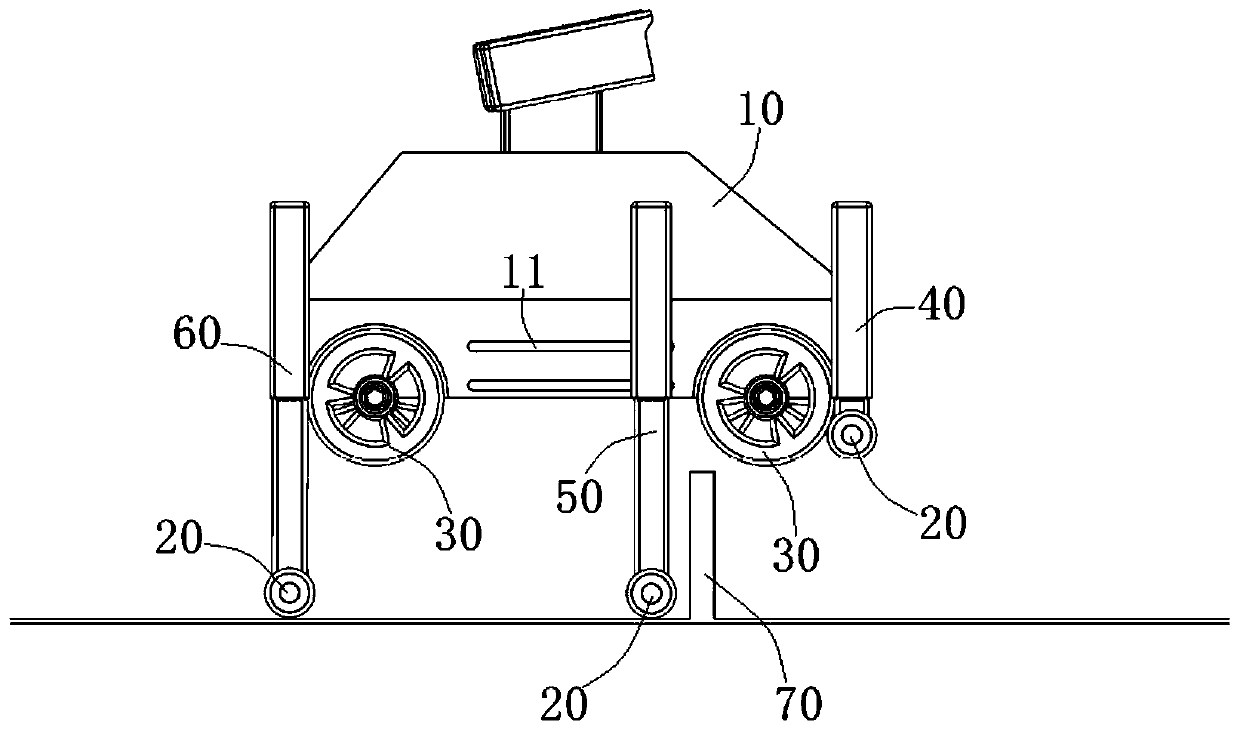
[0070] refer to figure 2 , the front support assembly 40 drives the corresponding first road wheels 20 to rise, and the first road wheels 20 connected to the rear support assembly 60 and the first road wheels 20 connected to the middle support assembly 50 work to drive the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More