

Driverless vehicle motion trail planning system and method for structured road
A technology of unmanned vehicles and motion trajectories, applied in control/regulation systems, motor vehicles, transportation and packaging, etc., can solve problems such as complex systems and poor interpretability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
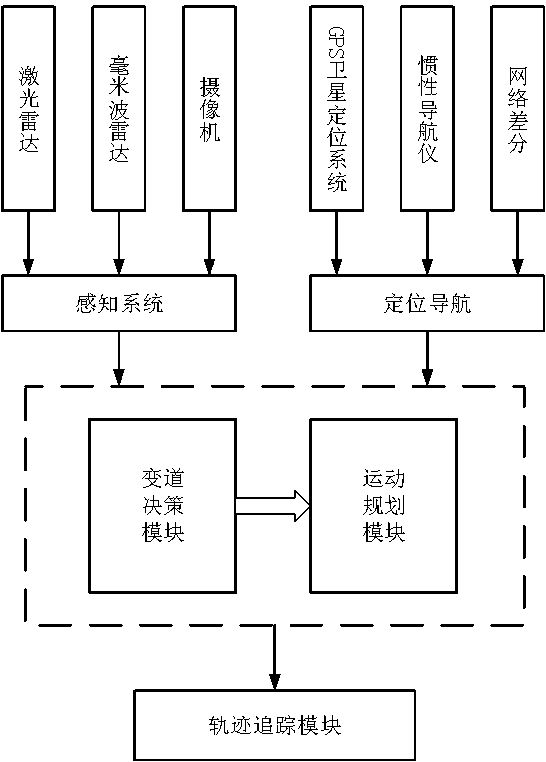
[0071] Please refer to figure 1 , the present invention provides an unmanned vehicle motion trajectory planning system for structured roads, including a perception module, a positioning module, a lane change decision module, a motion planning module and a trajectory tracking module; the lane change decision module is based on the perception module and The data collected by the positioning module outputs a decision-making action; the motion planning module outputs the optimal trajectory to the trajectory tracking module according to the decision-making action. The perception module includes lidar, millimeter wave radar and motion camera. The positioning module includes a GPS satellite positioning system, an inertial navigator and a network differential module.
[0072] In this embodiment, the lane change decision module mainly includes the following co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More