

Hollow joint structure of industrial robot
An industrial robot and joint structure technology, applied in the field of robotics, can solve problems such as the expansion of robot installation space, and achieve the effects of good control, high energy saving and environmental protection efficiency, and small transmission viscous resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
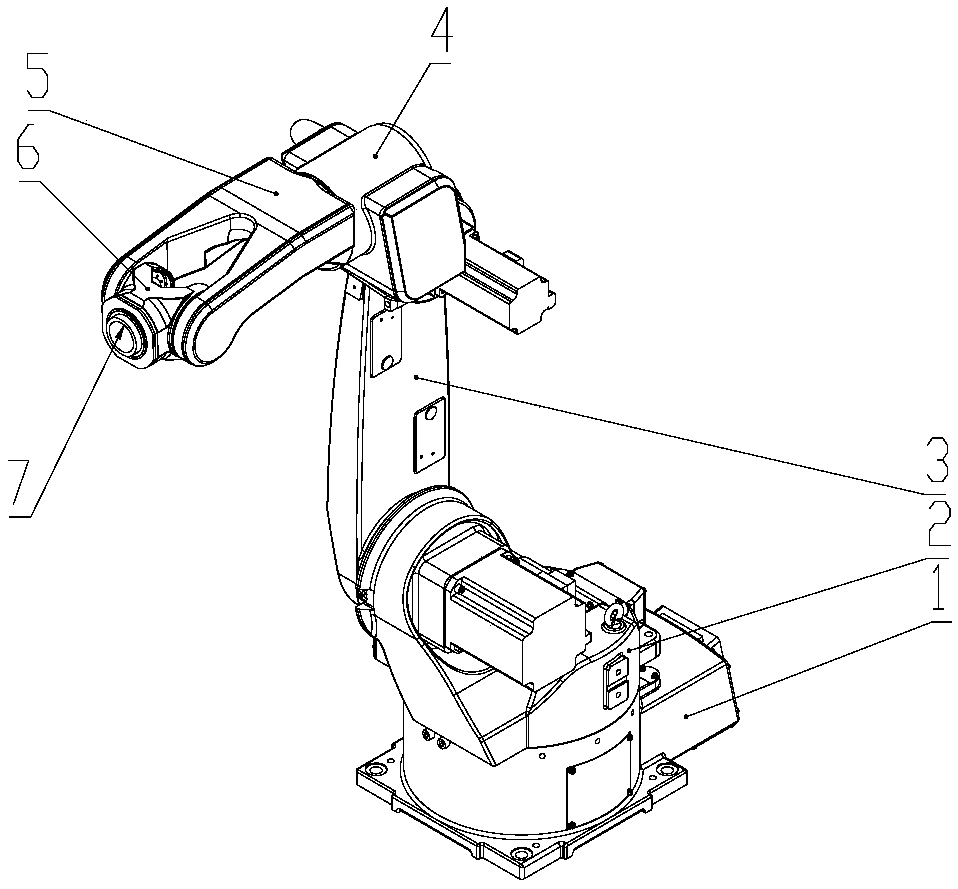
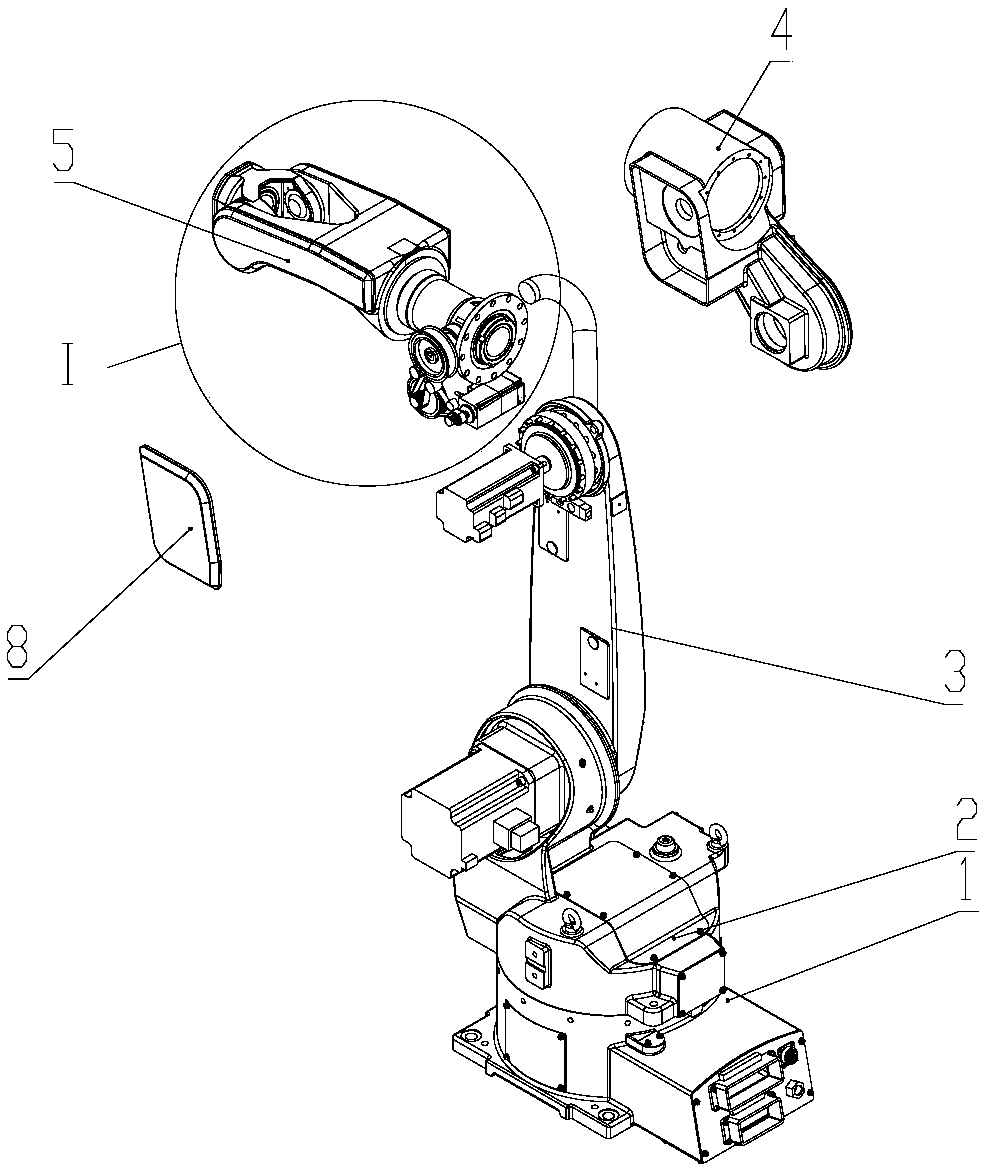
[0024] like Figure 1-2 As shown, the hollow joint structure of an industrial robot provided by the present invention includes a base 1, a waist seat 2, a large arm 3, a three-axis assembly 4, a small arm 5, a hollow shaft assembly 6, and an end flange 7 that are sequentially connected in rotation. Wherein the three-axis assembly 4 is provided with a four-axis rotation drive mechanism connected with the small arm 5 , and the four-axis rotation drive mechanism is used to drive the small arm 5 to rotate relative to the three-axis assembly 4 .
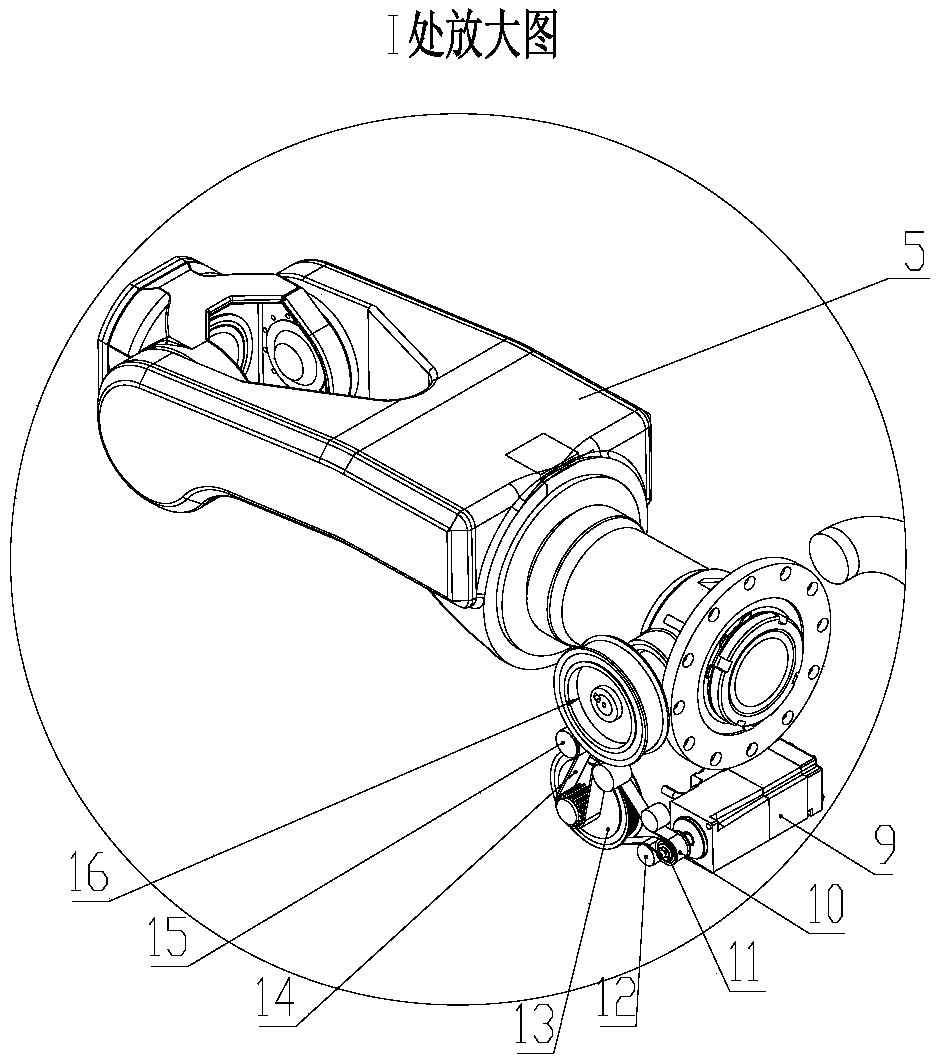
[0025] like Figure 3-5 As shown, the four-axis rotation drive mechanism includes a four-axis motor 9, a two-stage belt transmission mechanism, a four-axis small bevel gear shaft 17, a four-axis center cylin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More